Pushing the maker envelope all the way to the Master level, [Przemyslaw Brudny], [Marek Ulita], and [Maciej Olejnik] from the Politechnika Wroclawska in Poland packed a UAV full of custom sensor boards for their thesis project.
The Skywalker X-8 FPV drone underwent extensive modifications to accommodate the embedded systems as well as upgrading the chassis with carbon glass to withstand the high load and speeds they would need to perform their tests. The ailerons were customized for finer control of the drone. But for our money, it’s all the board design that supports those sensors which is really fun to delve into.
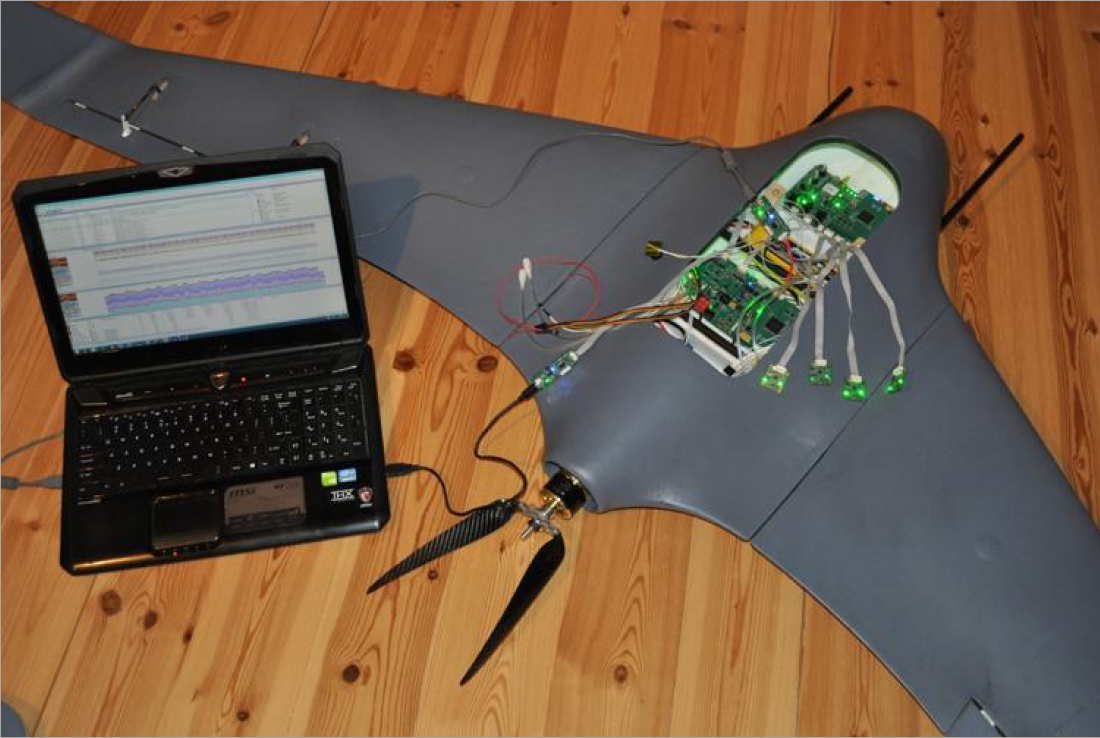
A bevvy of systems are supported by two NXP Kinetis K66 boards that form the backbone of the drone — one acting as the controller for the flight systems, and the other as sensor and power control board. The sensor board boasts of three NXP MPL3115 barometric pressure sensors, a NXP FXOS8700CQ 3D accelerometer, NXP FXAS21002C gyroscope, plus WiFi and GSM cards.
In another feat of engineering prowess, a purpose-built programming and debug board grants access to the Kinetis K66 boards via a specialized cable.
The final product is an almost entirely tailor-made UAV demonstrating the skill of these three graduate students which proves that, yes indeed you can major in drone. With diverse applications, such as agriculture, the demand for ingenious solutions to the technical hurdles that UAVs and drones face means the skills the grads have accumulated will be in high demand in short order.














“Carbon glass”, are you sure?
The linked article states “carbon and glass” fibre so I’m guessing that some words got lost when writing up.
You can purchase hybrid weaves of carbon fiber and fiberglass. This is useful in situations where there is a lot more stress/strain in one orientation, i.e. in an aircraft wing. See
http://compositeenvisions.com/composite-reinforcement-fabrics-2/carbon-fiber-colored-fiberglass-hybrids-99/
Ok, so does it fly ? :) Or was the thesis only about the hardware ?:)
Like the prop. it retracts for landing to prevent damage I presume?
And also folds up when gliding without motor power to reduce drag..
For the purpose of this project I quote a comment from one of the presumed participants:
”So main reason is that this project is supposed to be research one. We wanted to test somethings and learn:). We had idea to measure pressure in different spaces of UAV (as you can see each sensor is isolated) and check if there are any differences between them. Other reason was to test how I2C Mux IC is working:) (MPL315A2 does not have adress select so it is required if operated at same line). Much of the stuff used here is extra and probably unnecessary but we added them from curiosity reasons:)”