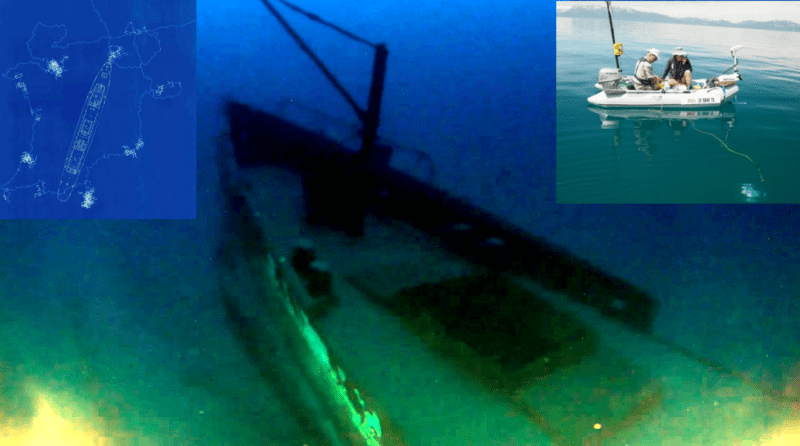
![DIY Research Vessel in use, while ROV is busy below. [Source: NYT]](https://hackaday.com/wp-content/uploads/2016/07/openrov-top-end2.jpg?w=250)
We previously covered the DIY research vessel that was designed and created as a floating base station for the ROV while it located and explored the wreck, and now the results are in! The video highlights of the expedition are below, as is a video tour of the ROV used and the modifications required to enable it to operate at 150m.
Underwater robotics is an area in which hobbyists regularly experiment and innovate. We’ve seen a smaller-scale robot trying propeller-free propulsion, and we’ve also seen the other end of the spectrum with multiple custom-designed propellers and ducts. The hardware is still only half the battle, so it’s really exciting to see the results of actual, practical use.














So I guess to get any comments, one has to use a Pi to blink an LED via an Arduino? This is a super cool project, and I love that it’s Open Source. I don’t have the ability to replicate it, or the need or want, but to have the technology at my fingertips… just amazing. The explanation video is great, and to see the shipwreck is awesome. Tahoe is an amazing lake. I loved the crawdaddy about half way through! I’ve caught crayfish in Tahoe, and they’re tasty. They’re also an invasive species, so better stock up on the butter ;)
Wait this has a Pi and an Arduino!!1!1!one!!1!
Hmm last time I was out fishing and someone caught a crayfish, it was hilarious. They thought they had a bite, reeled their line up and there at the end is a crayfish eating their bait. Apparently it decided it didn’t like being out of the water, before it let go and plopped back into the water from whens it came… I could have sworn it shook it’s claw at us. Good times :P
All the tangent aside, it is a very cool project.
“I don’t have the ability to replicate it, or the need or want, but to have the technology at my fingertips… just amazing.”
Anyone who thinks this is a good design or that OROV is a good company is fully outside the loop of ROV technology in general. There are far better solutions at the toy or hobby level that actually draw on scientific and engineering basics to make a good product. There are far worse actors in the open source hardware scene but OROV is guilty of some of the same offenses to the community as Makerbot.
Your comment sums up much of what is plaguing hacker culture today and those traits are seen as desirable by the publishers since it drives clicks, and cash flow to SupplyFrame.
Now there will be comments.
Okay, I’ll bite. I’m curious why you think that OROV is not a good design. It seems to me that the OROV is capable of decent depth (300 feet), good control (the ability to loiter over a target), and good video (digital 1080p with adequate lighting). It is expandable and configurable for different missions. This seems to put it in a category above the simple “PVC pipe and bilge pump” ROVs and into a class shared by commercial units. The only other ROV kit company I know like OROV is Blue Robotics ( http://www.bluerobotics.com/ ). I like the way OROV uses standard brushless motors instead of expensive sealed units like Blue Robotics uses. I always wondered why OROV felt the need to have both a BeagleBone and an Arduino in the ROV when the BeagleBone could handle all the controls.
As someone interested in buying an ROV kit, what features is OROV missing? Does it have design flaws? Does the new Trident address any shortcomings?
If you want to buy a kit to get into the hobby go ahead, just realize that this is a toy. At one time I promoted the early designs in almost any piece I wrote about ROV’s or subsurface technology. There were lots of smart people contributing and there was some good progress. Many of the serious builders stopped contributing once the venture became a commercial enterprise that enriched a few people rather than the whole community.
I will try to be supportive, but your statement that this new design is in the realm of commercial units tells me you’re a real novice. The depth rating is overstated by quite a bit and 300 feet is still considered surface water by most serious ROV hobbyists and all commercial builders. Control on this machine is crude and has no redundancy, the supposed “loiter” system only works in still water, the power system is under powered for what’s on board so don’t try to add anything else or you will have unintentional resets underwater which will throw off your navigation and stability systems. I think the Arduino and BB allow some degree of system separation but other design flaws mitigate any benefits while adding cost and complexity.
You should really learn about what you’re building by looking back at some of the projects around the web. If you want to spend 10x the retail price on motors because you are a buyer, not a builder, go ahead. If you can put a few months into a build then the same money spent on OROV will get you something very capable and expandable that will do much of what you want. Take some advice; you will want big lights and the ability to mount DSLR hardware after just a few dives. You should learn about umbilical versus free swimming designs and try to really understand why you are going to make each design choice.
I have been critical about the direction of this site and will try and inject something good into the community. If you do decide to DIY I will give you, and anyone else, my personal email address for guidance as long as your project is well documented online. I would prefer that it NOT be hosted on HAD because this place has become too toxic in the name of selling a few more parts, but in the end it’s your choice were to put your project. I have commercial units in operation but have discontinued any online documentation or advice because it wasn’t worth the trouble or the time.
If several people want to partner on this project to make the job of documentation a bit easier then reply here and we will get something organized. If I don’t reply just be patient, this is testing season and my email reply alerts have stopped working since I started voicing my opinion about HAD going downhill. Good luck no matter what you decide to do.
Just what I expected, fucking crickets, too lazy to even reply.
Sweet! Leaves me wanting a part 2
am I seeing that wrong or did they tape newspapers to those windows before scuttling the ship??
It looks like it could be some kind of thin wood as a shutter or something. Really looks weird; I had to re-play the ending several times and can’t seem to get a good look.