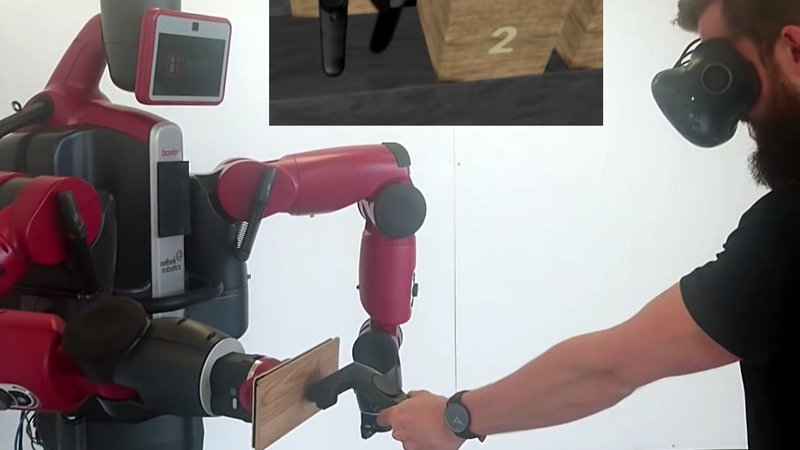
There isn’t a lot of detail to be found behind this short demo of robot-based physical feedback for VR, but the video (embedded below) demonstrates things well. It’s an experiment in generating force feedback for virtual objects using a Baxter robot and the HTC Vive. When the user presses against a wooden block in VR, the robot presses back which simulates the mass of the virtual object. Force feedback is one of these areas in which research is ongoing, and in a variety of different directions.
Like so many other things in life, nothing beats the real thing for actual physical feedback. Also, there’s something great about giving a $25,000 robot the job of impersonating a few simple wooden blocks in VR, just so you can strap on a VR rig and basically give a robot a realistic-feeling fist bump.
For those of you who’d like to experiment in this area without entirely re-inventing the wheel, we previously covered WoodenHaptics – an open-source haptics project working on providing a complete kit, but in the meantime everything is available from their github repository.
[via Reddit]














I also worked with a system that used robot arms to generate physical feedback for a simulation during my thesis. The biggest problem with that approach was that the maximum continuous feedback force was about 6.4N. For a realistic simulation of the materials we would have needed forces up to 100N.
Something weird here, and perhaps im just missing some critical piece of information, but how the hell is the Vive hmd stuck to this guy’s face? He doesn’t have the headgear on. Is he holding it with his other hand?
At about 54 seconds, you see him turn to his left and you can see that he may be holding the visor with his right hand.
There is another robot holding it on his head off camera.
There is another robot holding to his head off camera.
I’m holding it with my other hand.
Some sort of suit that had digitally controlled stiffness for it’s sections would seem to be a better solution, and it may cost less too. Some materials can be made more rigid in one direction so that if you have a rod and rotate it you can control how much it will bend in a given direction, but this does not let objects in the world push back, you’s only be able to simulate resistance. Another option would be plates all over a suit containing a polymer gel that is electroactive, then you may get both pull and pull effects that can be coordinated over the entire suit to have the virtual world push back.
Thanks for the feature, give me a message on youtube if you’d like more info!
I’m surprised no one’s mentioned the Novint Falcon; an older peripheral made here in New Mexico, USA for force feedback in three dimensional environments!
https://en.wikipedia.org/wiki/Novint_Technologies