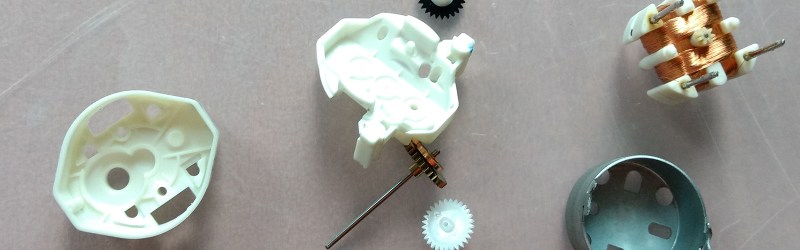
Automotive dashboards are something that largely go untouched in the average car’s life. Other than the occasional wipe with a damp cloth, they’re generally reliable for the life of the car and considered too tricky to repair as age sets in. Nevertheless, some hackers find themselves tinkering with them, and learn skills in the process, such as how to control stepper motors and talk to the CAN bus. Having done some projects in the past, [Dan] had some old tachometers lying around and decided to turn them into a piece of art.
The build is powered by an STM32 – a powerful ARM-based platform with plenty of IO and potential. [Dan] leveraged its capabilities to have the board generate music and react to its onboard accelerometer data while also driving the stepper motors from the old tachometers. The project was then completed by 3D printing a mounting plate and placing the tachometer assemblies into the back of an IKEA canvas print.
The end result is a piece of wall art that emits eerie stringed music while twitching around. It came about from [Dan]’s prior projects in working with dashboards. It’s a fun use of some well-earned hacking skills, but we reckon there’s even more potential. There’s a huge number of projects that could benefit from lightweight tiny actuators, and we’d love to see a robot made entirely out of junkyard dashboard parts.
For another dashboard hack, why not check out this beautiful Jeep desk clock?














To simplify the usage of a STM32F4 Discovery I made some examples for the Arduino environment STM32GENERIC:
https://github.com/ChrisMicro/Arduino_STM32F4_Discovery
I thought it could probably be useful for some artists to produce accelerometer controlled sounds quite easy.
Thanks for pointing that out, had no idea of the difference, and even after googling it I still don’t fully grasp the difference with stepper motors… In terms of control, I’m controlling them *exactly* like a bipolar stepper motor with 4 wires…
Dan
LOL, people people. @Annie don’t fall into the nomenclature trap. Whether the core exists, is made of air, iron, ferrite or anything else, if it operates in steps and works as intended with its coils connect to a bipolar stepper controller, chances are, it’s a stepper, if by function more than by name. It looks like there are distinct defined increments, they’re just 90 degree increments. The teeth on the rotor are just a little bigger than those in the more familiar nema 23 containers.
This indeed makes more sense, as I can definitely see the “steps” when I control them….
You’re probably right, but looking at it as a “black box” it really looks like a stepper: the quicker I generate the steps the faster the motor moves, up to a certain point where it can’t keep up. Each “step” moves the rotor by the same amount.
Given these 2 properties, if you didn’t know what was inside, how would you determine if it’s a stepper or an “air core” ?
Dan
I don’t thing @Annie is right in saying these are air core motors.
If they were air core, and you drove them like a 4-coil bipolar stepper, you would get only 4 different pointer angles displayed.
Since you’re driving them like a stepper, and they are incrementally rotating like a stepper they are a stepper and not an air core motor.
That’s not an argument, as there’s a lot of gearing between the motor and the pointer / needle, which means the 90degrees from the motor become 1-2 degrees on the needle.
Dan
Aircore motors point the needle at an angle that depends on the ratios of the currents on the two coils.
Aircore motors are “more” like an analog meter movements than they are a stepper motor.
You won’t get an aircore motor to step like this using an L293D.
So they are by my thinking (and by the demonstration) stepper motors and not aircore motors.
I’m with you that they a 90-degree-per-step (or 45-degree-per-step) stepper motors.
I have seen/heard those called sin/cos motors.