When somebody tackles an engineering problem, there are two possible paths: they can throw together a quick and dirty fix that fits their needs (the classic “hack”, as it were), or they can go the extra mile to develop a well documented solution that helps the community as a whole. We cover it all here at Hackaday, but we’ve certainly got a soft spot for the latter approach, even if some may feel it falls into the dreaded territory of “Not A Hack”.
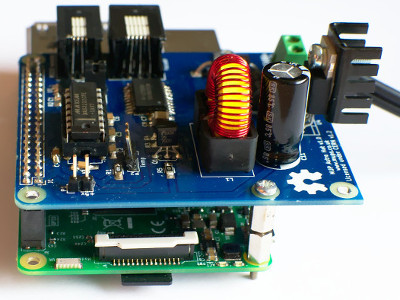 When [Gary Preston] wanted to control his telescope and astrophotography hardware, he took the second path in a big way. Over the course of several posts on his blog, [Gary] walks us though the creation of his open source Raspberry Pi add-on board that controls a laundry list of sensors and optical gear. Just don’t call it a HAT, while it may look the part, [Gary] is very specific that it does not officially meet the HAT specifications put out by the Raspberry Pi Foundation.
When [Gary Preston] wanted to control his telescope and astrophotography hardware, he took the second path in a big way. Over the course of several posts on his blog, [Gary] walks us though the creation of his open source Raspberry Pi add-on board that controls a laundry list of sensors and optical gear. Just don’t call it a HAT, while it may look the part, [Gary] is very specific that it does not officially meet the HAT specifications put out by the Raspberry Pi Foundation.
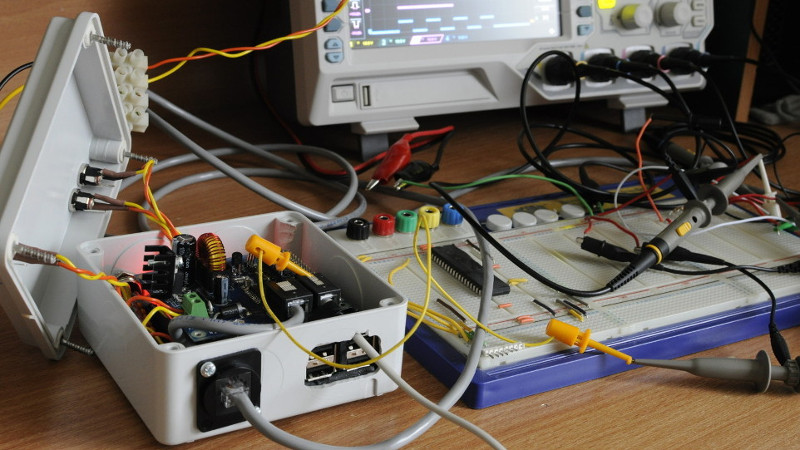
Even if you aren’t terribly interested in peering into the infinite void above, the extremely detailed write-up [Gary] has done contains tons of multidisciplinary information that you may find useful. From showing how to modify the Pi’s boot configuration to enable true hardware UART (by default, the Pi 3 ties it up with Bluetooth) and level shifting it with a ST3232 to a breakdown of the mistakes he made in his PCB layout, there’s plenty to learn.
Astro CAT is a completely open source project, with the hardware side released under the CERN Open Hardware License v1.2, and the INDI driver component is available under the GPL v3.
If this looks a bit daunting for your first stab at astrophotography with the Raspberry Pi, fear not. We’ve covered builds which can get you up and running no matter what your budget or experience level is.














I was faced with the same dilemma a few years back: Got a 6″ Meade Newtonian for 80$ because the controller was missing. However, this was a certain transition model so no of the available, used or new, replacement controllers were compatible. My quick and dirty hack was ripping an old tape drive apart to scavenge its beefy stepper controller IC, soldering to a stepper motor from a printer and using an overly precise crystal controlled frequency generator to control the speed. This hack cost nothing and worked more precisely than the original RA DC motor.
NanoPI is probably a better choice for this kind of hardware, as its form factor is smaller and easier to work with.
Is the size of the board really an issue here?
Not really, but its footprint is more appropriate for this kind of projects. Or a pi zero, if you can find it cheaper than nanopi.
really missed out on the chance to name it Cat-Astro-Pi here
Nice, will have to think about making it for my Nextar scope.
The link to Gary’s blog doesn’t seem to be working, so I can’t read the article.
Is it possible to use the Pi Camera as the eyepiece and focus the telescope automatically with a stepper motor? I.E. autofocus.