The future of humans is on Mars. Between SpaceX, Boeing, NASA, and every other national space program, we’re going to Mars. With this comes a problem: flying to Mars is relatively easy, but landing a large payload on the surface of another planet is orders of magnitude more difficult. Mars, in particular, is tricky: it has just enough atmosphere that you need to design around it, but not enough where we can use only parachutes to bring several tons down to the surface. On top of this, we’ll need to land our habitats and Tesla Roadsters inside a very small landing ellipse. Landing on Mars is hard and the brightest minds are working on it.
At this year’s Hackaday Superconference, we learned how hard landing on Mars is from Ara Kourchians (you may know him as [Arko]) and Steve Collins, engineers at the Jet Propulsion Laboratory in beautiful Pasadena. For the last few years, they’ve been working on COBALT, a technology demonstrator on how to use machine vision, fancy IMUs, and a host of sensors to land autonomously on alien worlds. You can check out the video of their Supercon talk below.
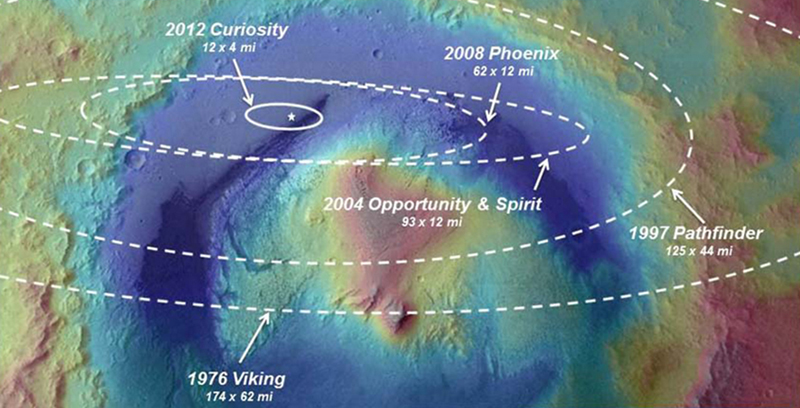
There are a few methods that have been used to land on Mars over the years. The first successful landing, Viking, in 1976, simply dropped the lander off at the top of the atmosphere with the hope of not landing on top of a gigantic boulder or on the side of a cliff. Curiosity, the car-sized rover that’s been going strong for half a decade, was a little more complex. The entry vehicle had an offset mass, and as the lander was plunging through the atmosphere, the computer could roll around its center of mass, imparting a little offset to its trajectory. This is also how the Apollo modules came back from the moon, and proof you can fly a brick, provided it doesn’t have a homogenous density.
But there are Mars rovers being built right now. The Mars 2020 rover is currently being assembled, and with that new landing techniques are needed to put the rover next to interesting geological formations. For Mars 2020, this means having the lander take pictures of the landing area during its descent through the atmosphere, compare those to maps created by one of the many Mars orbiters, and have the lander figure out if it’s going to land on a pile of rocks. If the lander senses it’s going to land in a dangerous area, it can divert its landing site a few hundred meters away towards safer terrain.
COBALT — the CoOperative Blending of Autonomous Landing Technologies — is a project to improve this technology. Eventually, we’re going to want to land on even more dangerous terrain on Mars or even Europa. These are challenging environments, and we don’t even have high-resolution maps of Europa. We probably won’t have high-resolution maps of Europa until we try to land there.
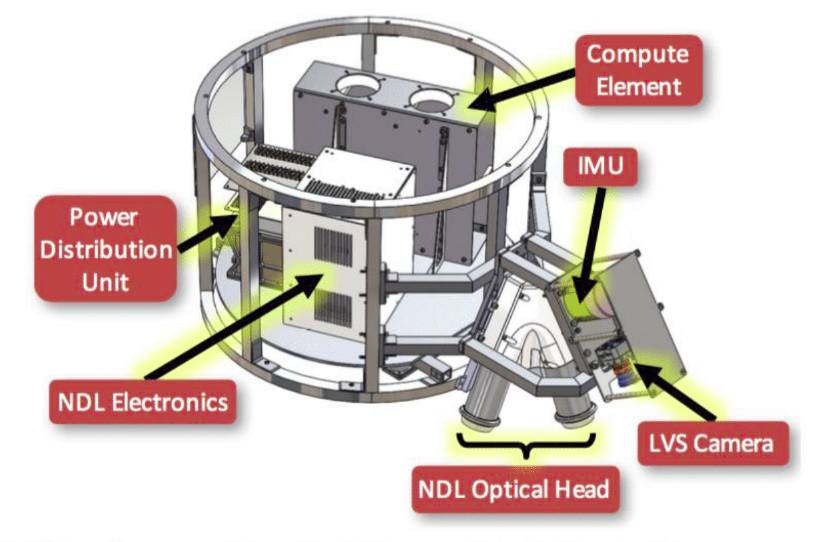
To manage this, COBALT is a payload package loaded up with LIDAR, cameras, IMUs, and a beefy computer providing real-time sensing for where a rocket will land. The COBALT team actually got a chance to test their payload out last spring in the Mojave aboard a Masten Xodiac rocket. This rocket shot upward, turned down its engine, then moved off to the side and landed on a pad a few hundred meters downrange.
This test was a complete success. You can check out a few videos of the test from the Armstrong Flight Research Center in the Mojave where the rocket goes up, figures out where it is, and directs the engine to a precise landing point.
There will be a lot of ways we’re going to land on Mars. SpaceX is going all-in with lifting bodies and offset centers of mass. Boeing will probably go Thrust or Bust. Who knows what China and India will do. We will eventually get there, though, and when it comes to worlds other than Mars or the moon, this is probably what we’ll be using.














Landing on Mars is not harder than anywhere else, it is just energetically more expensive.
Maybe they should balloon or glide down, rather than drop lile a brick, hover or hope to bounce.
Maybe they might even drop things down on a reverse space elevator style setup, if they can get that mass into orbit.
Without doing the math, I’d suspect that materials with the physical properties necessary to make a balloon or glider for a Mars lander are not known to mankind.
Several of each of those types of aircraft have already been designed for Mars, though none have flown there yet.
Mars’s atmosphere is 0.6% that of earth, so you need quite a bit of wing surface to effectively glide down.
as for balloons, that like having a weather balloon at 30KM up, that’s in the Hellas Planitia (1155 Pascals), weather balloons pop at 35-40km.. at the Peak of Olympus Mons (30 Pascals), that equivalent of 57KM, so of you want a baloon to coast down to the ground, you need something that can handle the pressures. also balloons =/= Airbags used to land the rover, unless that’s what you were thinking?
The low atmospheric pressure does preclude their use but weather balloons pop at a specific altitude because they are having to lift their payload from (Earth) ground level and therefore need to be filled with enough lift gas to displace sufficient air to take off. It’s not the absolute pressure that pops them but rather the change in pressure from initial inflation.
That said, the lower pressure would present a challenge, not just in air resistance but also because of how lighter than air flight gains buoyancy: you’d have to displace a far larger volume to gain the same lift, wasting more lifting potential holding the balloon itself aloft.
Do you mean, it’s harder, unless you just burn a LOT of fuel?
Basically yes.
The atmosphere o Mars is so thin that no reasonable amount of parachutes (or any other aerodynamic based braking system for that matter)would slow you down below 200km (obviously a little too fast for touchdown with passive solutions), so it’ll probably end up with something like the inflatable heatshield and a rocket powered landing.
A similar system can be used to slow down. In fact specifically SpaceX was thinking about ditching the parachutes and use a pure powered landing for this capsule…as the weight of the lander goes up, so does the weight and volume of the parachutes and just like anything in the real world, it doesn’t scale linearly, making powered landings more weight efficient.
https://www.youtube.com/watch?v=1_FXVjf46T8
We (the international space community) need to launch a cluster of GPS type satellites to orbit around the red planet.
Then approaching/landing/roving spacecraft will have a better idea of where they are and where they need to go.
Oh, and include a communications system (a la Iridium) with those satellites to enable better communications with dirt based systems on the far side of the planet. Include with each subsequent “traveler” a data base that includes topographical data obtained from previous orbiters.
You cannot have a society until you have a brewery; so Mars will be a difficult nut to crack at the societal level. Mostly because we would probably be restricted to brewing lagers for a generation or so after first settlement – until we have the energy and pressure vessels necessary to brew ales (cold vs hot process). And once your society has excess fuel/energy available you can make vodka and whiskey from potatoes.
That only applies to Earth, where brewing is still the most cost-effective means of producing large quantities of food-grade alcohol. The process on Mars is likely to be different, and will probably be centered at first around the production of vodka (ethanol) which can be readily produced from solar power and carbon-dioxide. There’s been quite a bit of promising work done in this area lately, including last year’s work with nano-spike catalysts at Oak Ridge and, more recently, Berkeley Lab’s work with nanocoral.
Oh, surely it’ll come much more quickly than you’re thinking. They’ll be questing after the first hangover within a month, plain and simple, and taste will not matter. Whatever biomass they find at hand will be used, sugars likely the largest problem to find. Don’t think there’ll ever be a martian lager or ale, will be something entirely different and the flavor ignored. A few generations down the line perhaps grains will have been discovered or developed and then a beer can be brewed.
Vessels? In the prison system they use a toilet and paper cup.
Yeast? We all carry that in our mouths.
Air. Water. Food. Beer! 3 minutes, 3 days, 3 weeks, 3 months. Can’t live without.
Two Astronauts went into a bar on the moon.
They soon left, as it had no atmosphere.
no. the future of humans is not on mars. there will be no future is we continue to treat the earth as we do now. on mars there will be even less to harvest.
Oh. sorry. I have been benchoffed again.
Some strange things been photographed on Mars. Nothing anybody can pin down. Sure we didn’t come from there to begin with? A desperate escape before total collapse from trashing it out just as we’ve now managed here. Will just 2 or 3 make it? Farmers do leave a field go fallow to regenerate. Seems funny we’ve learned to plant trees by dropping them from above, and seeds are even easier than that.
Whatever the future will be, for most humans it will be on Earth. But there is quite a large group of humans who want to (permanently) relocate to Mars. How large and sustainable this group will be depends on the cost more than anything else. Safety, travel time, health effects, etc. all play a role, but if the cost is low enough, many will relocate regardless. And the lower bound for the cost is basically the cost of the needed energy to get stuff accelerated from Earth and Decelerated on Mars, which is actually not that much energy, you just need to burn through it in very little time to even get off this rock.
We’re destroying the planets biodiversity at unprecedented rates, polluting the shit out of the earth, ruining the climate for millenia and having a president that might very well trigger a nuclear holocaust – and yet, people are concerned with Mars landings. We need to understand that there is no way off this planet for you and me. Even if somebody goes, it will just be a select few. We all are going to die here.
You’d die sooner on Mars.
Mars requires you to live deep underground to have a chance to live, and you’d be bored as hell and would have a enormous lack of resources, including something as simple as sunlight.
Living on Mars would be like living in am underground shelter on earth after there first was a nuclear armageddon which was then followed by a huge meteorite impact casting the planet in darkness.
In fact I’d not be surprised if a Mars colony would end in 2 years with massive suicide or people going nuts and murdering each other until nobody was left.
The same could be said of settlers most anywhere.
I like to think we do this not for our own vanity or escapism, but because it might give future generations more options. Sadly, it’s more practical for a small number of people to open up the Mars option than to convince a whole planet of people to treat the Earth one better.
Gentlemen! A Toast! To hoping we take both options.
I also wonder what kind of laws and government and such a Mars colony would fall under.
Frankly I don’t think it should fall under any present Earth one, but even if that is agreed what will you take as basis?
They should base it on Roddenberry’s:
Rule 1: Keep it nice, No religion
Like the Plymouth colony. It starts as a communal effort with intended control from “back home”. People start starving to death and free markets break out as a matter of survival. Production skyrockets. Then comes a couple hundred years of forgetting and getting ever fatter until it happens again. Rinse and repeat.
Unprecedented? Like that mass extinctions? Like the global ice sheets? Like manbearpig?
“The future of humans is on Mars. ” I have to say, bwaaaahahah. Have you seen Mars? You will never make up for the suicide rate!