The greatest challenge of robotics is autonomy. Usually, this means cars that can drive themselves, a robotic vacuum that won’t drive down the stairs, or a rover on Mars that can drive on Mars. This project is nothing like that. Instead of building a robot with a single shape, this robot is made out of several modules that can self-assemble into different structures. It’s an organized fleet of robots, all helping each other, like an ant colony, or our future as Gray Goo.
If the idea of self-assembling modular robots sounds familiar, you’re right. The Dtto won the Grand Prize in the 2016 Hackaday Prize, and it’s a beast of a project. It’s an ouroboros of a robot that can assemble itself into a snake, a wheel, or an arm. It’s weird, but if you want a robot that can do anything, this is the kind of modularity that you need. One step closer to Gray Goo, at least.
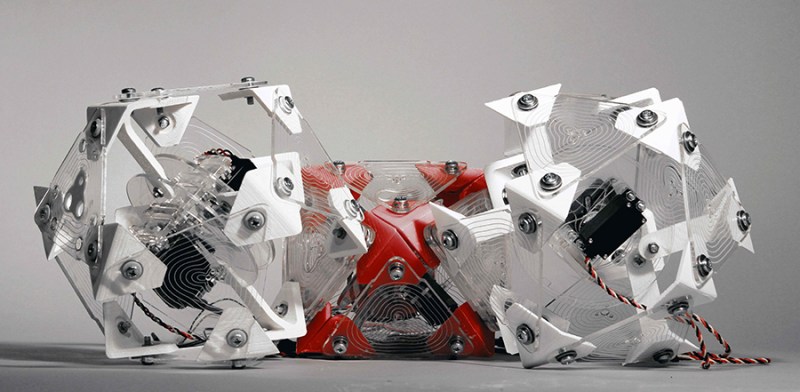
Like Dtto, the noMad can transform itself into bridges, arms, snakes, and wheels by assembling each individual piece into one component of a massive structure. It’s something we rarely see, and it’s a difficult computational and engineering problem. Still, the progress the team behind noMad has been making is remarkable, and we can’t wait to see the finished project.

















As long as it doesn’t turn into Amanda Tapping, I’m not too worried about our future.
Indeed
Surely we would want that?
Lets stick with the original.
(Who I was lucky enough to meet at GenCon some years ago)
To be honest, autonomy seems to be problem not just in robotics. International politics, for example, struggles with it as well.
Real transformers!
The concept is based on the cellular pattern! Think about smaller size and thousands of these.
It would be useful to have some specialised units. Eg ones that are fixed and rigid for structural elements. The flexible units then move the structural ones into place.
Ultimately it comes down to the energy used by the system. Assembling the structure vs maintaining it vs actuating it. Structural elements cost more energy assembling but reduce maintanence energy. Specialised actuation units could be optimised for one direction and be more energy efficient that way.
These remind me of a children’s TV series, Cubix.