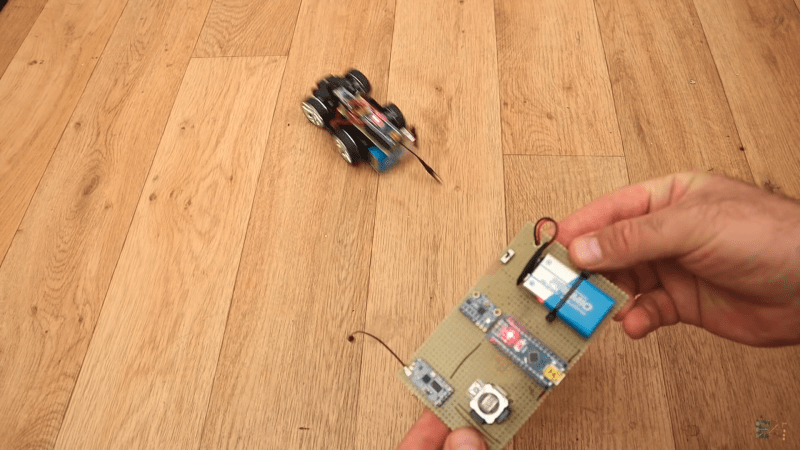
If you are a lover of all-things remote-conteolled, it’s likely that you know a thing or two about controllers. You’ll have one or two of the things, both the familiar two-joystick type and the pistol-grip variety. But had you ever considered that there m ight be another means to do it? [Andrei] over at ELECTRONOOBS has posted a guide to a tilt-controlled RC car. It is a good example of how simple parts can be linked together to make something novel and entertaining, and a great starter project for an aspiring hacker.
An Arduino Nano reads from an accelerometer over an I2C bus, and sends commands over a wireless link, courtesy of a pair of HC-12 wireless modules. Another Nano mounted to the car decodes the commands, and uses a pair of H-bridges, which we’ve covered in detail, to control the motors.
The tutorial is well done, and includes details on the hardware and all the code you need to get rolling. Check out the build and demo video after the break.
We’d love to see this idea turned up to 11 by using a more capable base vehicle, and finer controls on the steering– A Honda Civic perhaps?
[Thanks to Baldpower for the tip!]














It is a very nice project, even smaller and compact that some I made a couple years ago.
Helpful! Specially the HC-12 radio encoding and decoding, which I most only found ‘hello world’ examples on the internet to this day. Cheers from FritzenMaker
I had a commercially made tilt controlled R/C car in the ’80s called a Mind Master. The control was on a headband, and instead of a solid state accelerometer, it used mercury switches for a liquid state tilt sensor.
Parallax did this in 2005 for their BOE-Bot using their own 433Mhz modules:
http://forums.parallax.com/discussion/76904/a-tilt-radio-controller-for-your-boe-bot
Nice to see the concept done with HC-12 modules and the write-up is well done.