Most civilized nations ban the use of landmines because they kill indiscriminately, and for years after they are planted. However, they are still used in many places around the world, and people are still left trying to find better ways to find and remove them. This group is looking at an interesting new approach: using ground-penetrating radar from a drone [PDF link]. The idea is that you send out a radio signal, which penetrates into the ground and bounces off any objects in there. By analyzing the reflected signal, so the theory goes, you can see objects underground. Of course, it gets a bit more complicated than that (especially when signals get reflected by the surface and other objects), but it’s a well-established technique even though this is the first time we’ve seen it mounted on a drone. It’s a great idea: the drone allows you to have the transmitting and receiving antennas separated with both mounted on pole extensions, meaning that the radio platform can move. Combined with a pre-planned flight, and we’re looking at a system that can fly over an area, scan what is under the ground, and store the data for analysis.
[Via RTL-SDR]
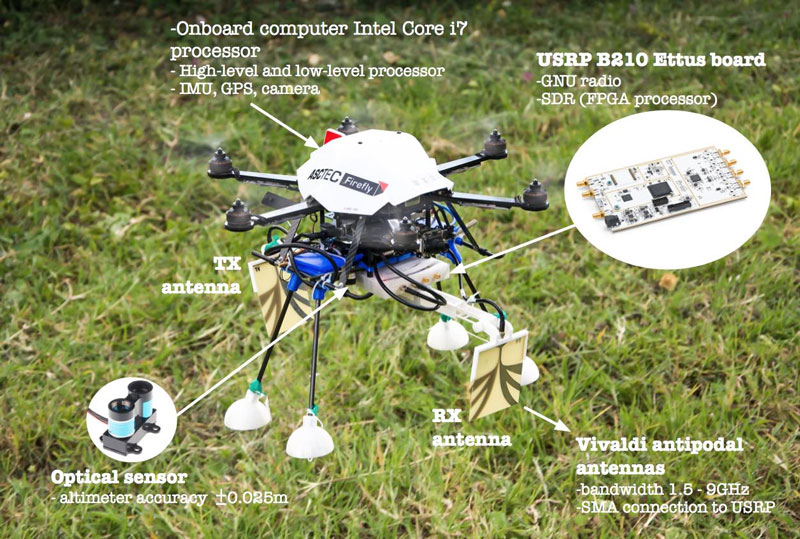
This team includes [J. Rodriguez], [C. Castiblanco] [I. Mondragon] and [J. Colorado] at the Pontificia Universidad Javeriana in Bogotoa, Colombia. This team attached an Ettus URP B210 SDR card with two Vivaldi antennas to an Astec Firefly drone, linked via WiFi to a Linux server for the heavy data analysis in GNURadio. The two antennas were located on either side of the drone, attached to a crossbar that separated them and also held the Ettus SDR device.
The trials on the device look promising: the team was able to detect several metal objects in a number of different soil types. The soil type and moisture level is a big part of the problem here: it affects the transmission of the radio signal, and thus the object detection. It’s a promising project that has potential: as the writers note, the use of an SDR system means that the radio detection system can be reconfigured, literally, on the fly. That means it could be adapted to different soil types, and even to detect different sized objects.














I imagine with Chip Scale Atomic Clock (CSAC) the resolution could be higher.
No
The bandwidth of the RF is the limiting factor of the resolution. Among other things.
One of my favorite antenna designs, but US7088300B2 means it is under a patent till about 2024 if I recall.
I will have to read their pdf to understand why they chose a unicorn. ;-)
I understand patents don’t stop research, investigation and experiment without need to contact the holders and in any case if there were a non commercial application that could be presumed to lead into a commercial product that’s worthy then simple matter to contact the patent holders and they might be pleased to open it up to paths beyond their interest, capacity at the time or whatever – and might even be able to share unusual further advances not yet published :D
Patents don’t apply everywhere, and some people or countries care more about solving problems than about patents. A few countries are already producing patented drugs at much lower cost for people who could otherwise never afford them. This may not be a fruitful strategy in the long run, but shows patents aren’t everything.
Use circular polarised antennae left hand LHCP. Use RHCP for the reflected signal. Much more directional. Bandwidth limit may require 3 for each.
Many anti personnel land mines make heavy use of plastics, rubber or glass, minimising or eliminating the use of metal parts – making them as hard as possible to detect.
That’s the whole point of GPR. It can detect tree roots, plastic, and soil disturbances. If the drone can maintain stable altitude or post processing can filter out variances this should work well enough.
Bodies?
GPR (and all radar) works on differences in dielectric constant. A mismatch reflects instead of transferring RF through. A GPR image shows layers, and any disturbance shows up as a … strangeness that needs to be investigated. It might be a rabbit tunnel, a rock, or a mine.
Hmm, so with a suitable tweak whilst moving the aperture and according to feedback signatutre that is such as a fiddle of the SWR and dither the frequency it should be possible to gain more information on the region ?
Correct link for Ettus USRP B210:
https://www.ettus.com/product/details/UB210-KIT
I didn’t get this until I read how it was funded. I assumed it was a group trying to solve the landmine problem in search of the best way. It’s actually a ground-penetrating-RADAR-in-a-drone grant in search of a problem.
Alternative use: archeology, covering big areas in short time.
I worked for the US Army on a similar device in the mid-90’s- we used a 150′ tall boom lift and a 1MW (as in MEGAWATT) peak pulse. The problem here is all about signal to noise- what you’re going to get from undergound is so much weaker than the surface reflections. You can integrate, but you need some extremely precise location- and the vibration on a drone is going to be crazy high. Ultimately they will need a lot of processing gain to make it work. They got their results flying less than a meter off the ground. Still a LONG, LONG way to go.
Drones can happily fly less than a meter off the ground all day, though! That’s one of the nice things about them, full closed-loop control.
Vibration is a concern, I was thinking EMI from all the motor noise too. Even though it’s a wildly different frequency, noise is still gonna sneak in all over the place.
I’m thinking being critical with the frequency range used in regards to the system environment, boundaries and internal system. think absorption, reflection and transmission characteristics. May be optimal ranges to use and just discard all the other ranges. Is interesting to study with all the range raw data however. Depends on that validation performance from my experience.
Why would you need drone and not just something on wheels?
Because the wheels could blow the mine and then you’d end up with a broken device. A drone that doesn’t actually touch the mines doesn’t trigger them, either, and thus you don’t need to keep replacing it!
You can easily make a very light wheeled platform that does not exceed the ground pressure to activate even anti-personel mines…
With the drone – apart the (much) higher cost, tall grass, twigs, small animals…the friggin’ WIND… will easily result in your expensive drone being stranded pointing upside-down in an active minefield. Not a solution.
Hmm, so you are ok with driving your wheels over a mine to see if it’s there, bit expensive :P
Steam roller. ;-)
If you’re gonna go that route you could just make a 6 foot steel sphere that rolls around the minefield like a suicidal BB-8! I wonder if DARPA would pay for that…
I’d like to see that at work. :-) You could release them out in the Korean DMZ. ????
See the Sherman “flail tanks” that were used to clear mines for the beach landings at Normady.
Old tech… (some) modern tanks can utilize mine ploughs, these don’t activate most of the mines, so it doesn’t take so much damage. Problem is, you still need the tank, which is expensive to run.
Recently an improved prototype has been developed by a team from Oviedo and Vigo, in the northwest of Spain (their technology is protected by a patent). A video can be watched here: https://www.youtube.com/watch?v=gsKptOPVARI
This link offers an interesting graphic towards end
https://www.comsol.com/blogs/vivaldi-antenna-design-analysis/
I see the patent claim refers to a fair bit of prior art with plenty of info to consider permutations for research at the least, still worth checking with the holders if you have a potentially serious product idea worth considering along these lines. Cheers.
We have worked extensively with GPR mounted and tweaked to work on a drone. To get it to more or less serial product stage with commercial customers. Thereprospects to use it for IED or anti tank mines. But there’s almost no chance to use it for anti personnel mines made in recent decades out of plastic. You can’t fly that low and get few enough reflections to detect objects with such dielectric resistance.
Tech is far more suitable for other applications, like we were assisting this year Arctic Hot Point Solutions in Greenland to locate missing WWII airplanes under 100m of icehttps://www.ugcs.com/en/news-entry/latvian-company-sph-engineering-helps-locate-aircraft-buried-under-greenland-ice-with-the-help-of-gpr-and-drone-integrated-syste
For small mines likely better tech will be to put artificial nose on a drone to sniff them out. Nevertheless we plan soon to work with EOD guys and real mines to assess different frequency radars as we have taken care of problem that drone needs to fly according terrain at very low altitude even without reliable elevation maps.