YouTuber and electronics engineer [Carl Bugeja] has a knack for finding creative uses for flexible PCBs. For the past year, he has been experimenting with PCB motors, using them on drones, robot fish, and most recently swarm robots. This is his final video in the vibro-bot series, and he’s got his best results to date. (Embedded below.)
He started off with flexible PCB actuators as robotic legs and magnets fitted into 3D-printed shells. The flexible PCB actuators work as inefficient electromagnets, efficient enough to react to a magnet when a current runs through, but not so efficient that they don’t release immediately.
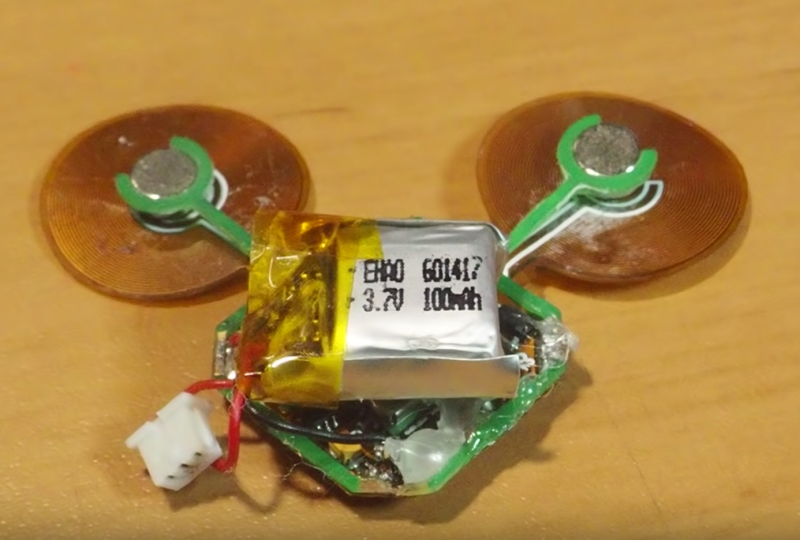
The most recent design uses a rigid 0.6 mm FR4 PCB that acts as the frame to prevent the middle of the robot from bending. The “brain” of the robot is located at its center, which is connected to the flexible PCB actuators. Since the biggest constraint on his past robots was weight, he removed two of the legs to reduce the weight by 20%, resulting in straighter walks. He also added a Bluetooth module to wirelessly control the robot and replaced his old LiPo with a new, lighter battery (28 mAh, 15 C, 420 mA).
His latest video now shows that the robot is able to move forwards, backwards, and side to side. That’s a huge improvement over his previous attempts, which mostly resulted in the robot vibrating in place or flopping around his workbench. It’s not going to fetch you a beer, but it’s really cool.














There are some theoretical papers on how a bristle bot moves:
https://arxiv.org/pdf/1702.00343.pdf
Probably it is the best to think about the forces and friction which is necessary to move the robot. The hairs have to have a certain angle related to the floor. Probably you can attache some rubber to the bots feet.
wow, this guy is really into it!
It seems these rely mostly on a bouncing-effect, a bit like a solenoid, which is something considering how much control he gets… but magnets have two poles, I wonder if he considered a warping-effect of the flex-pcb, possibly having two D-shaped coils on each foot, causing more of a crawling/rolling/slithering motion, instead…
[Pardon the nickname, not relevant, here]
I’d love to see an army of these little bots invade a library.