For many people the gateway drug to aviation is radio-controlled aircraft, and in [Andre Bandarra]’s case this led to paragliding. Now he has combined the two, turning his full size paragliding wing into an RC aircraft. (Video, embedded below.)
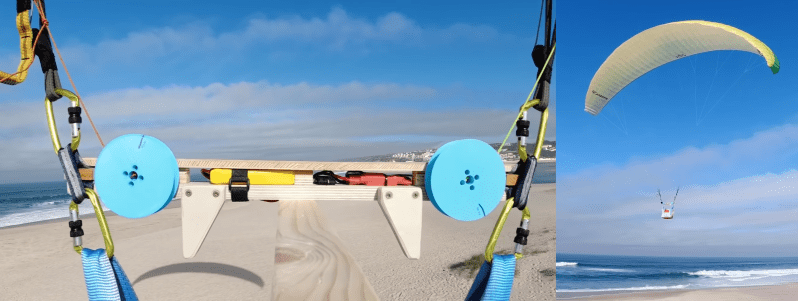
The primary controls of a paraglider are very simple, consisting of two brake lines that connect to the trailing edge of the wing. When a line is pulled, it increased drag on that side of the wing, causing it to turn. [Andre] connected the brake lines to two 3D-printed spools, which are each powered by a large RC servo that he modified for continuous rotation. These are mounted on a slim wooden frame that also holds the battery, RC receiver, an old electronic speed control to step down the battery power, and attachment straps for the wing. Without enough mass, the wing would just get blown around by the lightest of breezes, so [Andre] hooked a cloth bag filled with sand to the frame to act as a counter weight.
On the first test flight the wind was too strong and the sandbag too light, making it impossible to control. The hardest part of the flight is the launch, which requires the help of someone who knows how to fly a paraglider. The second test day had much better success. With only a slight breeze and a heavier sandbag, the contraption flew beautifully, floating slowly across the beach. He admits that there are a number of improvements he can make, but as a proof of concept using parts he had lying around, it was a roaring success.
For paragliding from flat ground, you can always strap a motor to your back, like the open source OpenPPG electric paramotor. For more crazy RC flying contraptions, also keep an eye on guys at [Flite Test].
Thanks for the tip [Joe]!














That is AWESOME … now need a local AI to start flying on his own :)
Then add wifi mesh, swarm them and patent it
SpaceX world wide wireless internet or phone service on the cheap
But a constellation of 12,000 paragliders is… only 1 for ever 42.5 thousand km^2 of the earths surface. Hmm, I wonder how high they would have to be for a global mesh to work.
Probably not needed at sea though, so only 1/3 the area.
Great implementation but, paragliders a prone to collapses when not actively piloting: implementing a feedback with constant pressure on the brakes can prevent such mishaps.
Not really, if you don’t have a comp wing or don’t fly in really rough conditions collapses are rare.
This reminds me,
an acquaintance of mine patented a system to launch an ultralight aircraft from level ground.
It consisted of a half mile of paracord, a gravel road, a tow vehicle, and no overhead obstructions (e.g. powerlines, trees) for the launch distance.
He would strap into the ultralight, hold onto the paracord as it unreeled from the tow vehicle, and when the cord became taut, he would drag his feet along on the gravel until he became airborne. The elasticity of the paracord helped “spring” him into the air. When he reached a sufficient altitude, he released his end of the paracord.
Wow, how did the patent read “One of the same methods as they’ve launched full size gliders since the ’30s but with paracord and an ultralight.”
Sadly, I did a search yesterday to find the patent, and instead found his obituary (cancer).
And a number of testimonials written by friends about his piloting and pilot instruction expertise.
Sorry to hear.
Joint Precision Airdrop System (JPADS) has been done for some time using a similar arrangement with an onboard laptop. Let’s see HAD do it with 555 timers!
https://youtu.be/Hf-gUOAPMdY