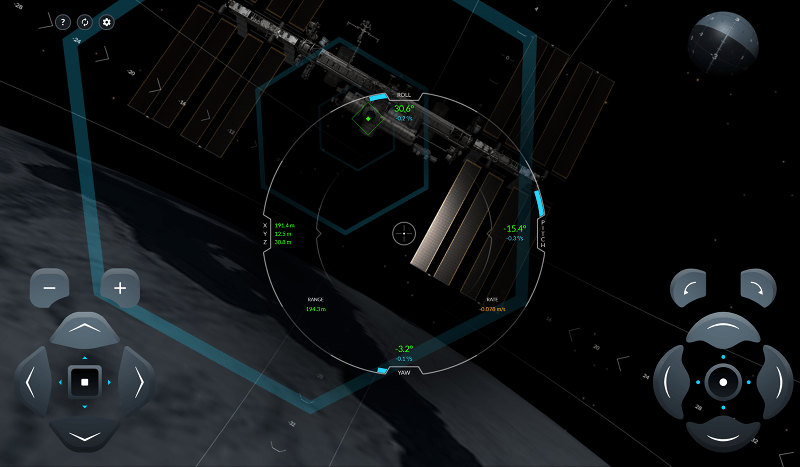
Complexity is a funny thing. In prehistoric times, a caveman might float across a lake on a log. That’s simple. But as you add a rudder, a sail, or even a motor, it gets more and more complex. But if you add enough complexity — a GPS and an autopilot, for example, it becomes simple again. The SpaceX Dragon capsule actually docks itself to the ISS. However, the crew on the station can take over manually if they need to. What would that be like? Try the simulation and find out. If you don’t make it on the first, try, [Scott Manley’s] video below might help you out.
This isn’t a flashy Star Wars-style simulator. Think more 2001. Movement is slow and it is easy to get out of control. The user interface is decidedly modern compared to the old Apollo era
Even if you do manage to dock, in real life you can’t just pop the hatch and enter the station. It takes a while for temperatures to warm up so you don’t get massive condensation when the warm moist air hits the cold docking tunnel.
[Jim Bridenstien] — the NASA guy — nailed it on the first try, we hear. But since he is a pilot, we figure he’s probably got more practice than we do.
We’ve seen some Kerbal simulators, of course. Maybe you have a spare RV sitting around?














First try too where do i apply ?
Indeed – this simulator actually shows it is probably a lot easier than you might think.
Same here
And same.
Another first try, reporting. Really not hard with some patience (even though I was hot-dogging it until 15 meters), though I have played a lot of space games.
Twice. Nailed it both times. Trick (remembered this from spin recovery training when I took flying lessons) is to first null out the pitch/yaw/roll axes, then work on translating, while gently bumping up the speed.
The other trick is to remember that every click in one direction has to be balanced by one in the opposite direction.
Slowly, slowly. First try took me about 20 minutes!
Would have been helpful to have a bit more precision on the Y-Z readings, I spent a lot of time waiting around as Y went between -0.0 and +0.1 trying to guess my sideways speed to get it precisely to zero, the controls weren’t quite fine grained enough so you always ended up with a (too low to be shown on the rate counter) drift either way. Also would be good to have explicit x,y, and z velocities shown at all times, and to finer accuracies too. Rearranging the controls to provide a visual reminder which they defiend as x,y, and z, and which direction was defiend as +ive would help also, all too easy in the heat of a moment to imagine a different convention (z towards-away, x sideways, y up-down the screen) and make the rong correction. Managed it first time taking about half an hour, made sure to sort out pitch/yaw/roll first before translating which ensured velocity thrusts would be in useful directions not angled ones which would be harder to cancel off later.
Yup, this is exactly how I did it as well, though I managed to get in there faster once I felt I had it line up well. Also, the site didn’t appear to tell you this, but you can use WASD for the translation controls and the numpad for yaw/pitch/roll (though 5 is pitch down, not 2). The 2nd time I spun the thing all around just playing with it, but I was able to 0 it out in just a few seconds, then I blasted towards the station at around 1 m/s until I was within about 50, then slowed it right down and brought it in. It’s really not hard.
that is awsome I screwed up my rotation was at 0.2 – need to be BELOW 0.2
Nailed it. Thank you Kerbal Space Program
It really isn’t hard. The automation makes is so much easier. Only thing I wish they’d add is relative translation rates for all 3 axes, like they have for the roll rates.
Remind me the Elite videogame (1984)…..
That’s kind of fun in a zen-like way. I spent way too much time on this last night.
I can’t believe they are really using touch screens as the control for thrusters in the real thing. So many ways that can go wrong.
I’m impressed you can actually fly all around the model and inspect close-up all the detail, even behind and the ends. They even took the trouble to put the ‘Canada’ label on the Dextre arm. Even the sun reflections off the solar arrays are correct. I didn’t sit long enough to see if the arrays rotate correctly though.
It seems clear they also include the rotation of the reference frame as you rotate earth.
But there’s obviously some kind of autopilot or mediation between the controls: There’s no cross-coupling between translation and attitude, for example. And the controls are obviously just a fixed impulse, not on-off.
It was easy to get my time down to 5 minutes. Not too hard to get it to 4 minutes. I’ll be impressed if one could get to dock within 3 minutes. It needs a timer and a high-score table to gamify it :-)
It looks like a great initial orientation tool, but I doubt it’s a truly accurate simulator for the real thing.
I just watched Manley’s video. Clearly he’s a better pilot than me, saying he can do it in 2 minutes. Gauntlet thrown!
My best time so far is 3 minutes, and a lot of that I wasted getting the orientation set, plus I was pretty conservative once I got within 50 meters. I was coming in pretty hot around 2 m/s. Could’ve come in faster and slowed down later.
We should turn this over to the speedrunning crowd :D
Just got 2:40. I think I could shave it down to Manley’s time if I tried, but I would NOT feel safe coming in that hot.
Embrain the number of degrees or meters you’ve got to move and hammer the thruster steadily to halfway then hammer it steadily the other way. That should be quickest. Probably zero points for fuel conservation though.
I managed to get my time down to 1:30 by hammering the thrust up to around 3 m/s, and then adjusting everything on approach, though I still handled orientation before translation for the most part. That was very much NOT safe though, as I was adjusting translation within the last 10 meters or so, and only reached a safe speed in the last 2…
Yeah… just did 2:15 and that was scary. Clearly Manley is a pro for a reason.
Woot! I did 2 minutes! My life is complete now.
I should add that in none of my attempts did I fail. BOOYA
I’m disappointed that the covers on Cupola are closed. Would be cool to see an astronaut watching from inside.
Failed twice on “rotation” whaaaaaat??? everything was green and under 0.2 . Was humming blue danube hard too. 2nd time I crawled the last meter, there was no relative motion there at all apart from forward.
Well 3rd time lucky I guess, damn crosswinds.
I had a friend who worked for NYC MTA and I got to drive the Staten Island Ferry once. Crashed into the dock at the battery and all the passengers fell over of course. I zigg zagged the whole way across too, it’s very easy to over-correct.
I imagine docking the dragon into the space station would probably go about the same.
You meant a “simulator” for the SIF, right?
B^)
No, I drove the actual full size SI Ferry.
I needed to read your post twice to get the subtle difference between “the passengers fell over” and “fell overboard”. Actually I’ve often thought boats and ferries are dangerous, having a slippery metal deck, with a railing you could easily slip under and plop into the sea if you were unlucky.
I’ve only piloted a much smaller boat, but yep there is a lag, I suppose partly dependent on vessel size as well as speed, between using the controls to make a correction, and the boat actually doing it. Once you’ve worked out how much of a nudge it needs, and how long it takes before it happens, you can do a much smoother job of staying in a straightish line.
Yes they just fell over, just like I have done many times as a passenger on the thing with a real pilot driving. Only had my car on it once though.
Still easier than getting a Type-10 Heavy through the mailslot at Obsidian Orbital without autodock during peak hours. 😏
I love doing this in VR. Actually just flying around things in VR is a great way to lose a lot of time.
Elite FTW :D
Any love for Frontier: Elite 2? I used to love landing manually on planets and moons, or docking manually in space. Gets easy with practice. For a game with no plot, you can spend hours and hours playing it, weeks even.
One of my favorite parts is the Flat Earth option in settings. Troll level Expert!
this thing was easy. there is a speed run thread for this on the ksp forum. id have expected a lot more instrumentation. the ui looks like it was ripped right out of a video game.
Remember that time the resupply ship crashed into Mir during a manual docking?
https://www.youtube.com/watch?v=tM7fTLLmgbk
I remember that happened the same day the episode of “The Cape” aired where they had a Shuttle run into the ISS. Strange co-incidences. That would be “The Cape” from 1996, not “The Cape” from 2016. Two completely different shows.
Ah, what “Progress” we’ve made since then…
First try and if I can do it, anybody can do it…. Think I’ll go back and just try joyriding around in it instead of trying to dock..
Can you really screw up and end up doing a reentry into the atmosphere?
No darn it… once you get too far away from the space station the game ends.. I pointed it a earth and hit forward a hundred times hoping to burn up in the atmosphere. :-)
there are some floating point quirks when dealing with newtonian flight sims. as you get far from 0,0,0 or your velocity becomes large, you get the jitters. this is what ksp players call “the kraken”. you can either come up with a more complex integrator, or you can place limits on what the player can do. they appear to have taken the latter approach.
Anyone knows if the yaw/pitch/roll changes are effected by gyros? When you bring the controls back to neutral your rate of change is zero, if it was based on firing rockets I’d expect you’d have to cancel that with a corresponding counter-firing, like it is the case with the translation controls. Thoughts? (no KSP player here, so this is probably a very n00b question)
I’m not certain about Dragon’s design, but it’s got no need to conserve propellant for its relatively short mission time, so it has plenty available for attitude control.
Reaction wheels (or control moment gyros) are pretty massive for the moment they can impart, so if you’ve already got a capable RCS and plenty of propellant, there’s no need to spend mass on wheels.
I’d be very surprised if they chose to put a reaction wheel or CMG on that craft.
And the controls are very clearly mediated by something massaging the inputs: you don’t control the individual thrusters directly, and a button push obviously just gives a fixed impulse, not a continuous firing. There’s also no cross-coupling (translation never imparts a rotation, for example), which would be difficult to achieve in a real vehicle without attitude sensors and a computer modulating the thrusters.
Astronaut John Young was even surprised by the computer in the loop, and commented about it on the first flight of the shuttle: The thrusters pulsing to maintain attitude during a translation burn at tank separation caught him by surprise. Which is kind of astonishing — a super-capable test pilot used to handling that kind detail himself, first, being surprised by it, and second that it didn’t come up in the simulator earlier.
I looked at the javascript. It appears to be fairly simple equations of motion such that the craft moves linearly in the direction of the velocity vector with a small ‘gravity’ input. Has anyone thought of modding it to implement the Clohessy-Wiltshire equations (checkout wikipedia)? That would make it much more realistic but seriously harder to dock.
I have not inspected the simulator code, but it’s obvious they do a simplified simulation, even for gravity: if you’re in free orbit to the side or above or below the station you’d expect to (appear to) orbit the station itself with a period the same as the orbit around earth (90 minutes). The simulator does not do this. It also curiously keeps zero-drift attitude control all by itself.
In contrast, in the real footage of the station approach you catch glimpses of the plotted trajectory on screen, and they are clearly curved orbits. So the flown Guidance&Nav software is definitely of a different level than that simulation. Hurley crowed about how accurate the simulation was, so he must have been training on a more advanced one.