A lot of great scientific breakthroughs come through imitating nature, but technology often runs up against limits in certain areas. This is particularly evident in robotics, where it takes a lot of effort (and cost) to build a robot which can effectively manipulate heavy objects but not crush others which are more delicate. For that, a research group has looked outside of nature, developing a robotic grasper which uses omnidirectional wheels to grab various objects.
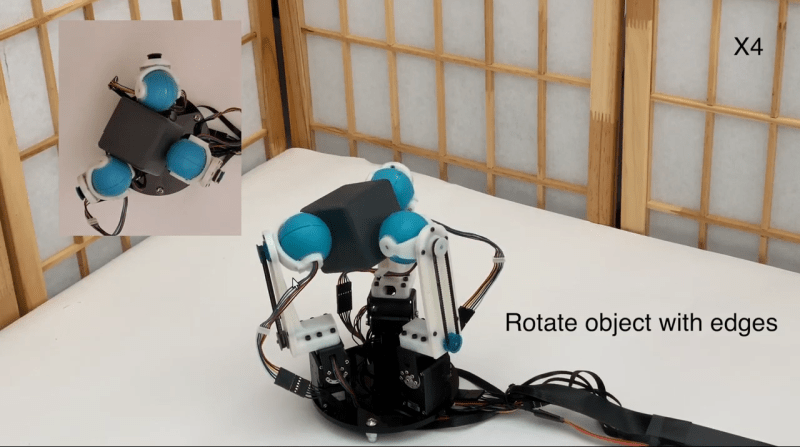
The robot hand is composed of three articulating fingers with fingertips which are able to actively manipulate the object that the hand is holding. With static fingertips, it is difficult to manipulate an object in the hand itself, but with the active surfaces at the fingertips it becomes easier to rotate the object without setting it down first or dropping it.
The project is much more than designing the robot hand itself, too. The robot uses calculated kinematics to manipulate the objects as well, but a second mode was also tried where the robot was able to “learn” how to handle the object it was given. The video linked below shows both modes in operation, with interesting results. If you prefer more biologically-inspired robot arms, though, there are always novel designs based on non-humans.














This is a really interesting paradigm shift in gripping.
Since I’m a machinist, I conceptualize this like one I suppose. The fact that there are 3 arms made me think of it in terms of a lathe scoll chuck, with 3 jaws.
Theoretically 3 points of contact are the minimum needed to both define a plane, and to properly constrain an object for machining, or in otherwords, hold it securely in place.
If that concept extends to this, it should work securely- but due to the points of contact all being in effectively the same plane/crosssection due to the fact the arms pivoting from 3 defined points lead closely to that effect.
Many objects have troble being held in a 3 jaw chuck- like square stock, so 4 jaw chucks are needed, but a 12 jaw chuck can hold almost any isometrically similar shape around one axis.
If this was scaled up to 12 fingers, perhaps it could be said that the change in rotation at the second degree of fredom, the axis of the driven roller grippers, would apply forces non- tangent to the same plane as thd grippers grasping, and you could hold something no matter how oddly shaped dead solid.
Maybe I’m totally off on this, but that’s how I’m thinking about it. Very cool concept, pleasant to watch.
Is that allowed? Who gave them permission to do that? It seems like cheating :-D
Kidding aside, it’s inspiring me to think of maybe an “all finger” or all limb type of robot, that rolls on it’s finger tips and raises the limbs needed to manipulate. Simplest case would have 6 limbs methinks. It could maybe do things like climb up door frames or poles and explore ductwork. Could put in balance routines so it can stand on just two limbs or maybe even just one. Maybe you could build them in co-operating jointed segments with two arms a piece and plug 3-50 together for ant to centipede configuration. Centipede could be quite useful, standing up and passing you things off the floor etc.