We’re not sure what kind of, “High School,” [Sam Baumgarten] and [Graham Hughes] go to that gave them the tools to execute their robotic gripper so well. We do know that it was not like ours. Apparently some high schools have SLS 3D printers and Solidworks. Rather than a grumpy shop teacher with three fingers who, despite that, kept taking the safety off the table saws and taught drafting on boards with so many phalluses and names carved into the linoleum, half the challenge was not transferring them to the line work.
Our bitterness aside, [Sam] and [Graham] built a pretty dang impressive robotic gripper. In fact, after stalking [Sam]’s linkedin to figure out if he was the teacher or the student, (student) we decided they’re bright enough they could probably have built it out of scraps in a cave. Just like [HomoFaciens], and Ironman.
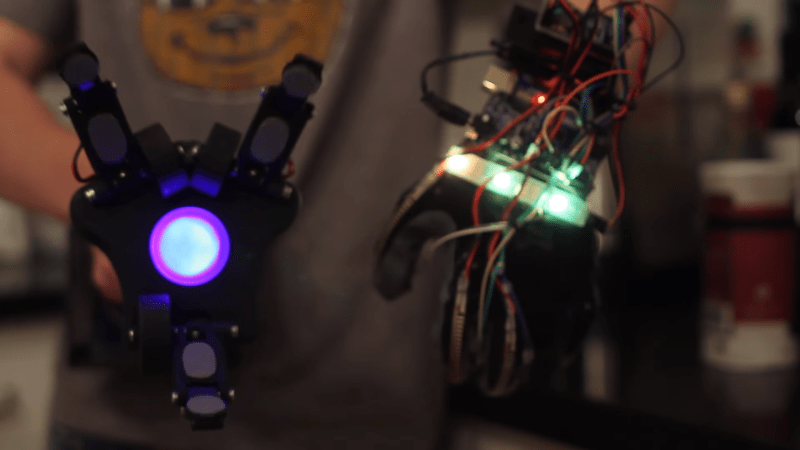
The gripper itself is three large hobby servos joined to the fingers with a linkage, all 3D printed. The mechanical fingers have force sensors at the contact points and the control glove has tiny vibrating motors at the fingertips. When the force of the grip goes up the motors vibrate more strongly, providing useful feedback. In the video below you can see them performing quite a bunch of fairly fine motor skills with the gripper.
The gripper is mounted on a pole with some abrasive tape, the kind found on skateboard decks. At the back of the pole, the electronics and batteries live inside a project box. This provides a counterbalance to the weight of the hand.
The control glove has flexible resistors on the backs of the fingers. The signal from these are processed by an Arduino which transmits to its partner arduino in the gipper via an Xbee module.
[Sam] and [Graham] did a great job. They worked through all the design stages seen in professional work today. Starting with a napkin sketch they moved onto digital prototyping and finally ended up with an assembly that worked as planned. A video after the break explaining how it works along with a demo video.
Warning: Dubstep Below














what kind of, “High School,”…
Well judging from the books on the bookshelf behind him one of he parents is a wealthy NY based medico, or that school has a fun curriculum.
Maybe if you knew Sam you would know he just loved to build things. I had the pleasure of working with Sam the summer before he started high school and he helped us build an app on his own. We had people more than double his age try to do what he did, but fail. Sam did this for no money or equity, he just helped us. Sam is a curious and brilliant person and instead of judging him why not say wow thats freaking awesome. I’m sure there are a ton of kids who have access to an amazing education and money who have no drive. Kids like Sam will go on to do great things and I wish I had 20% of his drive when I was in high school.
They’re all just jelly.
Impressive build. I’d hope that more kids would put that kind of effort into their builds.
I’d hope that more adults would put that kind of effort into their jobs. ;)
I’d hope compensation keeps pace with inflation, thereby giving more adults more reason to ‘do their jobs’
Nice build
Sam was an intern at the company I worked for a few years ago and he was brilliant. Among other things, he set up automated UI testing for our IOS project.
“Warning: Dubstep Below”
Thank you for the warning! Some of us are not fans. ;)
The claw looks great!
No problem:)
http://hackaday.com/2012/08/09/robotic-hand-with-haptic-feedback/
I like Sam’s enthusiasm–somewhere along the line I got trained to not be enthusiastic like that, not sure where. :)
Also, the presentation in the top video is excellent. It moves along through the description of the project without rambling or showing irrelevant video. I wish more people could give an overview of their project in such a concise way.
Ok, good job , what is the CAD used here?
SolidWorks
Awesome project! Thanks for posting! Sounds like Sam has a blinding bright future ahead of him. I work in automotive plastics and we use robots and vision systems for molding parts, assemblies and sorting.
If Sam is interested in internships or a career in automation for the automotive field, please feel free to contact me. The company I work for encourages and rewards independent, self motivated and out of the box thinkers like Sam.
Can i leave this here? http://www.roboteernat.co.uk/animatronics/robot-hand/ a uni project i did in 2007 of a wireless operated 10 DOF robot hand.
I like this design too :)
I admire your machine hand.I want to know what is your gloves sensors on the?How did he work?