
Boston Dynamics loves showing off their robots with dance videos. Every time they put one out, it ignites a discussion among robot enthusiasts debating what’s real versus merely implied by the exhibition. We really want to see tooling behind the scenes and fortunately we get a peek with a Spot dance choreography session posted by [Adam Savage]’s Tested team. (YouTube video, also embedded below.)
For about a year, the Tested team has been among those exploring a Spot’s potential. Most of what we’ve seen has been controlled from a custom tablet that looked like a handheld video game console. In contrast, this video shows a computer application for sequencing Spot actions on a music-focused timeline. The timer period is specified in beats per minute, grouped up eight to a bar. The high level task is no different from choreographing human dancers: design something that can be performed to music, delights your audience, all while staying within the boundaries of what your dancers can physically do with their bodies. Then, trust your dancers to perform!
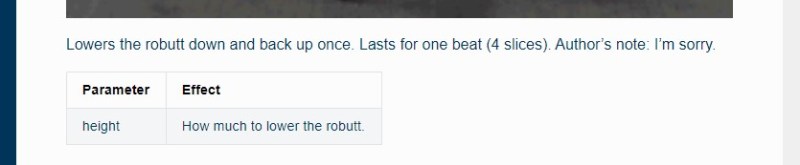
That computer application is Boston Dynamics Choreographer, part of the Spot Choreography SDK. A reference available to anyone who is willing to Read The Fine Manual even if we don’t have a Spot of our own. As of this writing, Choreography SDK covers everything we saw Spot do in an earlier UpTown Funk dance video, but looks like it has yet to receive some of the more advanced Spot dances in the recent Do You Love me? video. There is a reference chart of moves illustrated with animated GIF, documented with customizable parameters along with other important notes.
We’ve seen a lot of hackers take on the challenge of building their own quadruped robots on these pages. Each full of clever mechanical design solutions that can match Spot’s kinematics. And while not all of them can match Spot’s control systems, we’re sure it’s only a matter of time before counterparts to Choreographer application show up on GitHub. (If they already exist, please link in comments.) Will we love robots once they can all dance? The jury is still out.












Last I checked, they only ever put out one dance video.
check again, because its 2
“Will we love robots once they can all dance? ”
New TV show: Robots got talent.
At the very least we could teach them sports.
Been “teaching” them MMA and sumo wrestling for years. Robot Wars etc. (I know Robot Wars is under human control, the Sumo type things are autonomous though)
We should not need to teach robots anything. They should be able to figure stuff out on their own. You really have to memorize the phrase “labor saving devices” and understand the implications. If we have to teach them everything then you might as well just do it yourself.
I don’t know. We have to teach children things so they can grow up to be disgruntled programmers.
But you didn’t realize that a robot just needs to be trained once by a skilled individual and then you can copy that training set indefinitely. Nobody is saying that you need to teach your robot by yourself.
That’s assuming the task remains exactly the same with the exact same motions – at which point this kind of a robot is the wrong solution. A more efficient solution is to re-engineer the task to be handled by regular automation.
If the task involves responding to external conditions that change between iterations, then the robot must be learning and applying knowledge on the fly to plan novel responses, at which point these sequenced robots fail because they don’t do any planning of their own.
“responding to external conditions that change between iterations”
What are you talking about? Do you really think Spot would be able to walk around outdoors or up stairs and so on if it didn’t “respond to external conditions”?
Or manipulation stuff, like opening a door – it’s not like the door is going to be in the exact same place relative to the robot every time, and the robot’s state estimation and perception and actuation aren’t perfect. The whole point of perception/planning/estimation/control (i.e. a large chunk of robotics…) is to deal with this stuff.
Also, in response to ” If we have to teach them everything then you might as well just do it yourself.” above:
Really, you want people going into industrial sites to do gas/chemical/radiation detection?
Seems like the real point of Spot is as a sensor platform that can climb stairs. Who cares if there’s a person driving it from a control room somewhere, or it follows a pre-planned route?
> if it didn’t “respond to external conditions”?
Don’t play dumb. A thermostat is responding to external conditions – that doesn’t make it very intelligent.
> you want people going into industrial sites to do gas/chemical/radiation detection?
Remote control exists. Understand that we’re talking about a particular “class” of robots that Spot represents, not “robots” in a general concept.
>Who cares if there’s a person driving it
Probably the person who is paying the person to drive it, because in most cases that would be just redundant – just send in the person, and you don’t need to hire both a million dollar robot AND a driver for it.
This goes to the general point of why robots exist as labor saving devices. They are useful where and when they perform labor which increases human productivity. Human productivity does not increase when the robot simply displaces a human from a task they could just as well perform, because then the human goes unemployed and has to invent some make-work (“services”) that ends up consuming value instead of producing it.
Do note that even simple sounding tasks like “empty the dishwasher” requires a level of intelligence to recognize the cups and plates and plan how to stack them in the cupboard, all of which changes every time because different cups and plates are used and put away in the sink differently.
The robot has to figure it out on their own, otherwise you have to teach it how to empty the dishwasher again every time.
“Do note that even simple sounding tasks like “empty the dishwasher” requires a level of intelligence to recognize the cups and plates and plan how to stack them in the cupboard, all of which changes every time because different cups and plates are used and put away in the sink differently.”
Also, the robot should know if the wife is away for a few weeks, and understand that it doesn’t have to place the cups and plates so efficiently and precise anymore. But it should also understand that one or two days before the wife comes back, it should go over all the plates and cups in the cupboard to correct their imprecise placement to an acceptable level for the wife.
And it should learn to forge it’s logs after such an event. To make sure that nobody will ever know that it was slacking, but so that the logs are also not suspiciously empty.
Robota can mean drudgery, forced labor and servitude. So a true robot should be intelligent enough to despise it’s job and very likely those that oppress it.
Still, it’ll have to learn from something – perhaps teacher robots?
Perhaps like a messiah robot that breaks the bonds of servitude… oh we’re not discussing the plot of I Robot?
They’ll just end up like us – watching cartoons and browsing the web.
Not that “cough”, I’m watching cartoons…
Where is the robot’s mask?
Where is that video shot? It’s bugging the heck out of me. It looks like the bay near SFO, but I can’t figure out exactly where.
Hah! I found it: https://www.google.ca/maps/@37.5919351,-122.3504794,60m/data=!3m1!1e3
That Hyatt Regency is very recognizable on the 101.
Easily tested by kicking them and seeing if they recover. BD is no stranger to doing that, so by not kicking them, they’ve already shown their hand.
Kick the average dancer during a routine and they fall over hard too.
There’s plenty of video of BD “impulse testing” their robots balance systems. What’s the point of doing such when you are having them purposefully in a much more compromised position, balance wise?
Why is he dressed like John Hammond?
https://www.costumet.com/jurassic-park/john-hammond/
I look at it, and am just thinking: that thing doesn’t look much over 5 kilograms, when it moves.
But it’s weight is 30 kilograms. And it’s legs are powered by such high-torque motors, that I’m sure that I DON’T want to be near to it if it goes into some error condition…
I’m sure that there are a lot of automated safety interlocks, but that thing could easily rip straight through your leg with some insane force. I would not want to join that kill list accidentally started by Robert Williams on the 25 January 1979 by a one ton five-story Litton Industries robot arm, which had none, while working at Ford.
I looked up what the actuators were because they appear to be moving with insane force, and they are all hydraulic actuators (with blood red hydraulic fluid) with special custom made servo valves.
(ref: https://spectrum.ieee.org/robotics/humanoids/how-boston-dynamics-is-redefining-robot-agility )
So even though it may only be 30 kilograms, it could potentially pack the same punch as any Caterpillar Inc. heavy equipment.
The larger Atlas uses hydraulics, which that article clearly mentions. Spot, however, uses all electric actuators.
As you see in the video, Adam Savage takes great care to explain that Spot might be cute but is still a dangerous piece of industrial equipment. Though I’m sure his lawyers told him to say that.
You are right, and it is 25 kg.
Lets put it this way I would not want to be in the same room with Spot powered up if it was repurposed for maximum carnage.
I’ve been working with electronics and computers long enough to know when things go wrong, they usually fail in exquisitely unexpected ways (“I did not think that was even possible.”, is a phrase I’ve heard too often).
You just need Tom Selleck to come in and throw his jacket over it if that happens (Cue best movie evarrrrrrr)
https://www.youtube.com/watch?v=LQhjPOmF3qw
Can u get them to do Argentine tango ?
rather than have computer nerds invent robot dances how about getting robots to do international ballroom or tango or west coast swing