
If you want to build your own rover, there’s plenty of cheap RC trucks out there that will provide a serviceable chassis to work with. Looking to go airborne with a custom drone? Thanks to the immense popularity of first-person view (FPV) flying, you’ll find a nearly infinite variety of affordable fixed wing and quadcopter platforms out there to chose from. But when it comes to robotic watercraft, the turn-key options aren’t nearly as plentiful; the toys are all too small, and the commercial options are priced for entities that have an R&D budget to burn. For amateur aquatic explorers, creativity is the name of the game.
Take for example this impressive vessel built by [wesgood]. With a 3D printed electronics enclosure mounted to a pair of pontoons made of cheap 4-inch PVC pipe available from the hardware store, it provides a stable platform without breaking the bank. Commercial jet drive units built into the printed tail caps for the pipes provide propulsion, and allow the craft to be steered through differential thrust. Without rudders or exposed propellers, this design is particularly well-suited for operating in shallow waters.
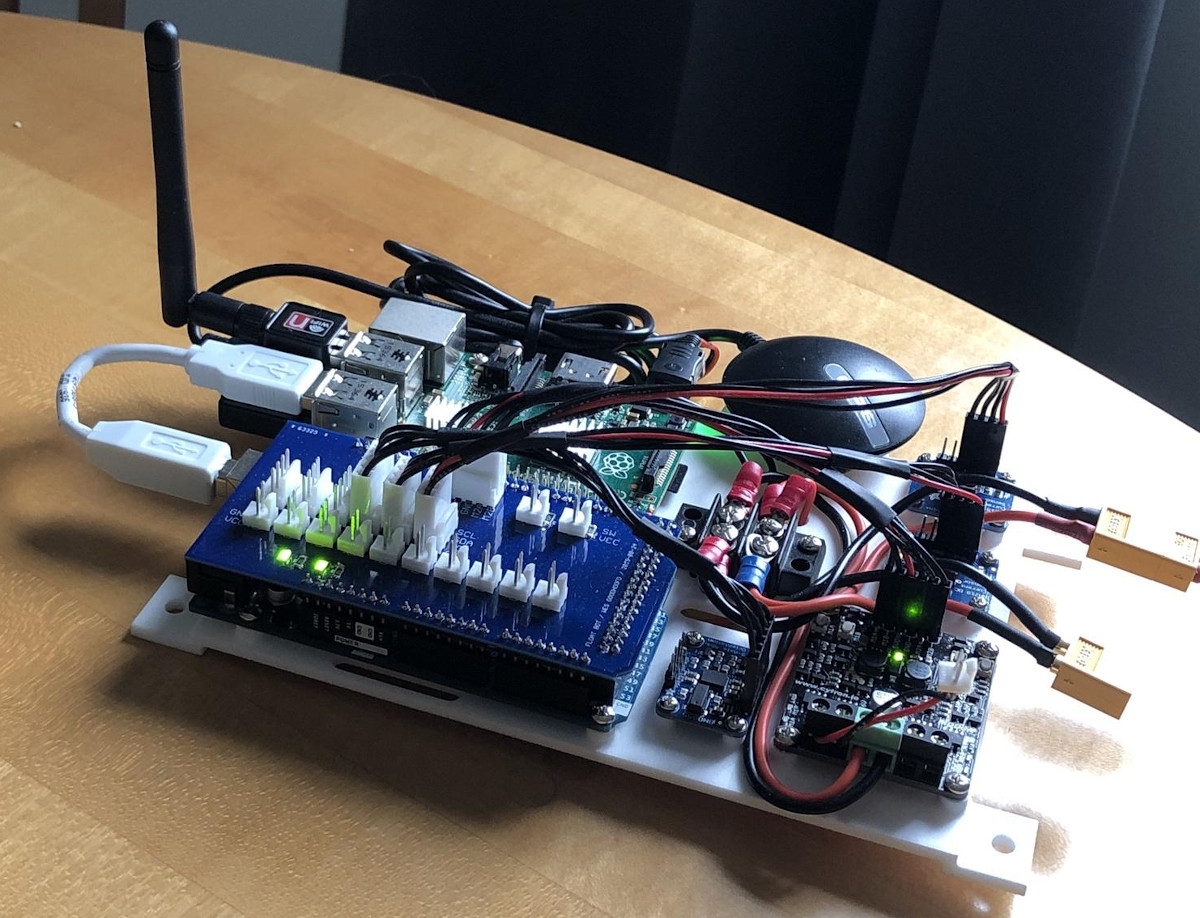
Perched high above the water, the electronics box contains a Raspberry Pi 2, BU353 USB GPS receiver, and a Arduino Mega 2560 paired with a custom PCB that offers up convenient ports to connect a dual-channel Cytron 3 amp motor driver and Adafruit BNO055 9-DOF IMU. Power is provided by two 6,000 mAh LiPo batteries mounted low in the pontoons, and a matching pair of Adafruit current/voltage sensors are used to keep track of the energy budget. A small USB WiFi dongle with an external antenna plugged into the Pi offers up a WiFi network that [wesgood] can connect to with an iPad for control.
If the control software for the craft looks particularly well-polished, it’s probably because [wesgood] just so happens to be a professional developer with a focus on mobile applications. While we’re a bit skeptical of using WiFi for a critical long-distance link, we can’t deny that the iPad allows for a very slick interface. In addition to showing the status of the craft’s various systems, it lets the user either take manual control or place waypoints for autonomous navigation — although it sounds like that last feature is only partially implemented right now.


We love this design, and are eager to see more as the project develops. Recently [wesgood] experimented with payloads that can be suspended from the bottom of the electronics box, specifically a sonar module for performing bathymetric observations. There’s considerable interest in crowd sourced depth maps for inland waterways, and a robotic craft that can reliably chart these areas autonomously is certainly a step up from having to collect the data manually.














looks like a bomb
Only in Boston.
This is a great design and a slick UI! After messing around with custom props for a similar craft in my pond, I may lift this PVC pontoon idea.
With the top box suspended so high above the pontoons, it looks like it could be flipped over by a small wave fairly easily. What happens then, can it right itself and is the top box fully waterproof? It also needs some ID and contact # on the side in prominent lettering stating it’s a survey project so people don’t freak out if they spot it.
Sorry I didn’t look at the imgur photos, the laundry list of other sites that are referenced when visiting stuff hosted there is ridiculous.
Ignoring for the fact that clearly this is operating in still waters, it’s hard to believe we’re looking at the same pictures here. This thing has a ridiculously wide stance, and the real weight (batteries, motors) is in the absolute bottom. I don’t see how this thing could possibly tip over unless it’s in a hurricane.
What would be a very useful application is a robot boat with side scan sonar to search for submerged objects like vehicles. Adventures with Purpose is a group of divers who look for people who went missing, last know to have been seen in their vehicle. They’ve closed over 20 cold cases by finding the missing persons in their vehicles, having driven off into rivers, lakes, or ponds. They’ve also found many vehicles that were apparently stolen then driven or pushed into water. At one place they found two trucks that had some stolen ATMs in the back.
If a group like that had a fleet of robot boats they could cover more water in less time.
Very nice! One way you can improve it, though, is by using the maritime convention for light colors. Use red lights on port side (left) and green on starboard side (right).
It’s a cool idea, but I would point out that the biggest issue with a small catamaran is that if you capsize one, it stays upside down, whereas a monohull can be designed to right itself. That might be a significant factor in an unmanned boat, depending on what you’re doing with it.
When I was young, I used to sail, and the Hobie’s were always fun, but a pain in the ass to get em’ upright again after you flipped one.
Awesome project, thanks for sharing!
I’m on a patent for a very similar watercraft: (US 6,854,406) – sadly, this is *not* very stable and will be extremely susceptible to winds. I tested this design out in the open ocean (South Atlantic), and it is still being used regularly.
Jet drives are not efficient, and tend to get their intakes clogged with relatively trivial things like trash and aquatic plants. At the very least, you need the ability to reverse the impellers to try and clear clogs.
For stability, keeping heavy items low (like the batteries) will be invaluable. (this is not like the “pendulum fallacy”, as the weight can be low and is damped by the water).
This caught my eye. I’m a competitive sailor and marks a placement is a complication that event organizers suffer with. That this seems headed towards programed autonomy it would be very useful to be able to deploy from the general area and have the platform hold position until retrieval. Love the project!