A line follower is a common project for anyone wishing to make a start in robotics, a small wheeled device usually with some kind of optical sensor which allows it to follow a line drawn on the surface over which it runs. In most cases they incorporate a small microcontroller or perhaps an analogue computer which supplies power and steering control, but as the Crayon Car from [Greg Zumwalt] demonstrates, it’s possible to make a line follower without any brains at all.
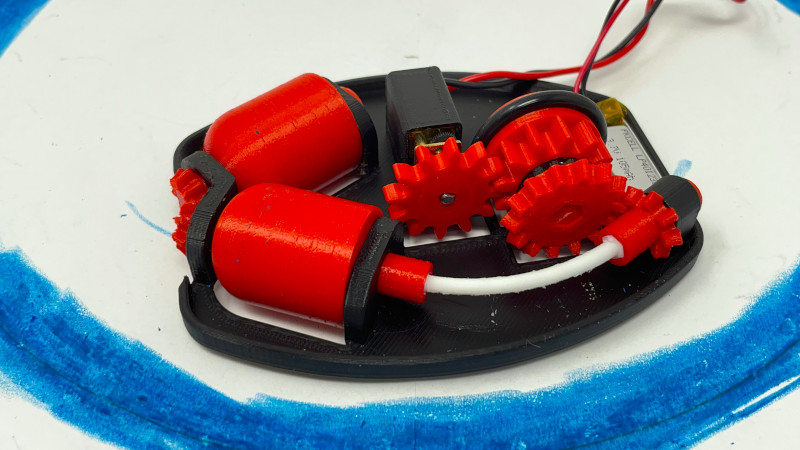
This seemingly impossible feat is achieved thanks to the line and road surface, it runs on a piece of paper over which the line is drawn with a crayon. The robot has a single straight-line drive wheel at one end and a pair of driven rollers at 90 degrees to each other at the other end, with the magic happening due to the difference in friction between paper and crayon. The robot follows a circular track with no problem, and while we can see it’s not without flaws we doubt it would be possible to make a simpler follower.
Sharp-eyed readers will have noticed that this is not the first line follower we’ve shown you which claims to have no brains, but we’d claim that since the previous machine had an analogue circuit, this one is a more worthy contender to the crown.













There was a line follower in one of the UK electronic magazines back in the mid 1970s – possibly “Everyday Electronics”.
I reemember it too. https://worldradiohistory.com/UK/Everyday-Electronics/70s/Everyday-Electronics-1975-06.pdf
I think they were doing light seekers and line follower type bots in 1968 and 1969 in Practical Electronics
The robot follows a circular track with no problem, and while we can see it’s not without flaws we doubt it would be possible to make a simpler follower.
Is that what you meant to say
Lol, better still –
“it’s possible to make a line follower without any brains at all”
I think [Greg Zumwalt] would be deeply offended.
Perhaps – it’s possible to make a line follower that has no brains at all
Engrish – It’s not what you say, it’s what you don’t say!
i love it. a hack! and the innovation was explained in the text, i only had to use the youtube if i wanted to see it go. :)
External power and a mechanical guide mechanism – slippery slot car?
Early sixties, cover of Popular Electronics. A line follower, no way for a computer in there, and nobody could afford one either.
So they were all about simplicity, until they weren’t.
In 2016 when this came up, someone commented that it was the March 1962 issue.
I think Carl & Jerry might have had a story about a line follower.
This is highly sophisticated, using an active analogue computer and even dual purposing an input device (friction sensor) as also output device (propulsion).
Though this is just intended as pun, it’s surprisingly true.
That’s more like an automaton than a robot though
Not trying to be a jerk here, but I would like to point out that most line followers that were built before the 2000s WERE simple mechanisms. They usually incorporated some motor drivers and transistors with CDS cells, or IR transistors for line detection. No microcontrollers necessary.
I think that’s the “analogue computer” that was already referred to.
How do you define a “computer”?
A mechanism which integrates the differential friction between two rollers on a surface is also an analog computer. Similar computers were actually used to calculate and predict tides.
I think the difference between a computer and a “mechanism” here is whether the device models the problem in an abstract quantity which is then translated into actionable output in a separate step.
A pair of phototransistors which directly turn two motors on and off, do not compute the problem in an abstract quantity. They directly cause the robot to turn left or right when the corresponding sensor falls off the line. This is a mechanism. Same thing here – the output of the rollers is not an abstract quantity you read off of a dial to steer the robot – it directly steers the robot.
I think there might me a bit of a grey area here.
The way you are referring to is is more or less as a defined state machine however one input (friction) is variable.
It’s not a state machine either. It doesn’t have “states”. One roller just tries to push left and forward, and the other right and forward, and the vector sum of their friction forces sums up into the resulting motion of the whole carriage. The robot with the phototransistor switches is actually doing the same thing – the transfer curve between a motor being on or off is just steeper.
The difference where it becomes a “computer” instead of a “mechanism” is when you add another layer in between the sensor and the motor, which interprets the input according to some arbitrary criteria. At that point the system is measuring something and comparing abstract values, and then translating that into actionable outputs which are not physically linked to the inputs. It’s performing computation.
It’s another one of those questions like, “Is a hammer a machine?” Yes… but no.
There is nothing but a motor and battery here.
No sensors. No transistors. No motor drivers.
So why don’t they just use an ARM to sense the motor current, bluetooth to a raspberry pi to connect to Amazon’s machine learning cloud so it can determine which wheel is on the more slippery crayon?
I get that, and I do think it’s clever. My point of contention was that the wording of the article makes it sound like it’s diffivult, and requires some arcane wizardry to make a simple line follower without complex digital logic.
Fun! If it were spring powered, it would be truly mechanical — someone should do that!
Aren’t you someone?
Though if custom line materials are allowed, in the field of line following mechanical contrivances (With ubiquity of such up to argument) then old Dickie boy Trevithick did it earlier in 1804.
It’s neat, but it’s also a bit like a rail. Where do you stop? Is a crayon ok? Is a wire ok? Is a super-conducting rail ok?
A line follower with no brains? See those queueing up every day.
Tim from Grand Illusions demonstrated a commercial wax crayon line follower a few weeks ago….
https://www.youtube.com/watch?v=NoA8G4TfX0c
Back in the 80’s/90’s there were line followers for steel plate burning with cutting torches. Long since replaced by CNC setups with plasma torches.
What a neat mechanism! I didn’t really understand how it could work till I saw the video, and it works surprisingly well!