When you think of ethanol, you might think of it as a type of alcohol, not alcohol itself. However, in reality, it is the primary ingredient in adult beverages. Which means humans have gotten quite good at making it, as we’ve been doing for a long time. With this in mind, [Sam Barker] decided to make ethanol out of apples to power a small engine to charge his phone.
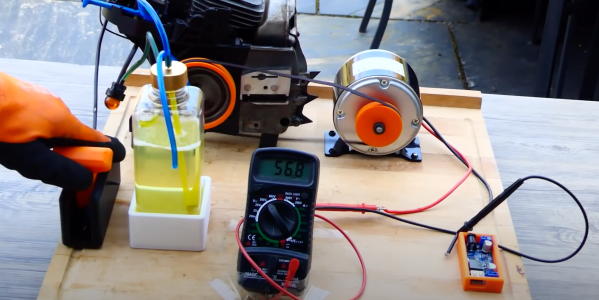
The steps for making pure ethanol is quite similar to making alcoholic cider. A friend of [Sam’s] had an orchard and a surplus of apples, so [Sam] boiled them down and stored the mush in jugs. He added activated dry yeast to start the fermentation process. A dry lock allowed the CO2 gas that was being created to escape. Over a few weeks, the yeast converted all the sugar into ethanol and gas. In the meantime, [Sam] sourced a chainsaw and adapted the engine to run on ethanol, as ethanol needs to run richer than gasoline. The video below the break tells the story.