3D-printed gearboxes are always an interesting design challenge, especially if you want to make them compact. [ZeroBacklash] created a little strain wave gearbox (harmonic drive) for when you want to trade speed for torque on NEMA 17 stepper motors.
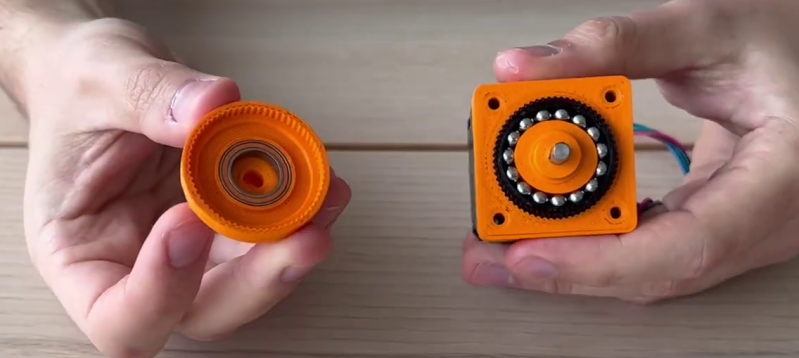
Strain wave gears work by deforming a stationary flexible spline into an ellipse so the teeth engage the internal teeth of the output spline. Add a couple of extra teeth on the output side, and you get a high-reduction gearbox with fewer parts and reduced volume than equivalent spur gearing. Keeping the flexible spline stationery is achieved by making half of it engage with a stationary spline with the same number of teeth.
In this case, there are 60 teeth on the input side and 62 on the output, giving a gear ratio of 30:1. The flexible spline is deformed using a set of bearing balls and an elliptical plug on the shaft of the motor. It makes for a compact design that matches the frontal size of the stepper motor and is only about 27 mm long. [ZeroBacklash] has not released any design files, but the idea should be simple to replicate.
We’ve featured a couple of 3D printed harmonic drives of different sizes, but they usually use a pair of ball bearings as the wave generators, which doesn’t lend itself well to smaller designs.














That video screams “You have selected Microsoft Sam as the computer’s default voice.”
Right? I’m not a big fan of this synthesized voice trend taking over the internet. It makes things less approachable as a viewer
Maybe some people are not confident in their speaking voice due to natural impediments, thick accent, or their English not being fluent.
I’d take subtitles over an automated voice any day.
Time to petition Youtube to allow selecting between audio tracks, so you could have one without the speech. The subtitles are already there.
There’s a mute button and subtitles that you can enable right in the embedded video. So…uh…
If the subtitles are already there, then you can just mute the audio.
The problem isn’t in the synthesized speech, the problem is in the text itself. If the voice was used to speak normal (or better chosen) sentences (in combination with some decent punctuation) things would sound way better.
The opening does not sound natural at all and the hello sounds very awkward, getting off on the wrong foot and going down hill from there. But videos with synthesized speech do not have to be bad at all.
Huh, does it sounds like SAM (“Software Automatic Mouth”), which was available on 8-bit platforms in the ’80s?
Now I got a severe case of the C=64 flashback/nostalgia… :(
Had it on my Atari 400!
That’s a TTS output? I’d thought the creator hired someone on Fivver to read a script
Abselute brilliant design. Pitty about people not in this age not knowing about a mute button if a voice bother them
So off track….. What was he talking about? …….straighn wave gearbox, not his audio!
I so want to get the stl or stp files for this design. It is brilliant.
The module of the teeth is 0.8mm, the rest should be easily replicable in fusion
+1 for using “bearing balls” for the parts found inside ball bearings
I am waiting for the cyan and magenta synth wave version.
Looking forward to seeing the rest of this gun turret being assembled