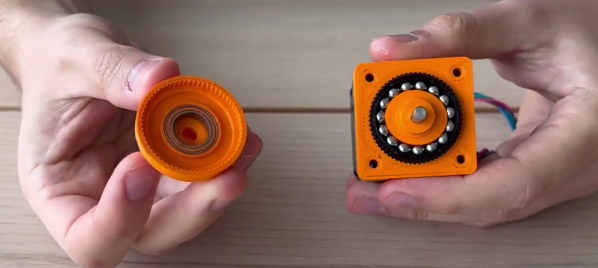
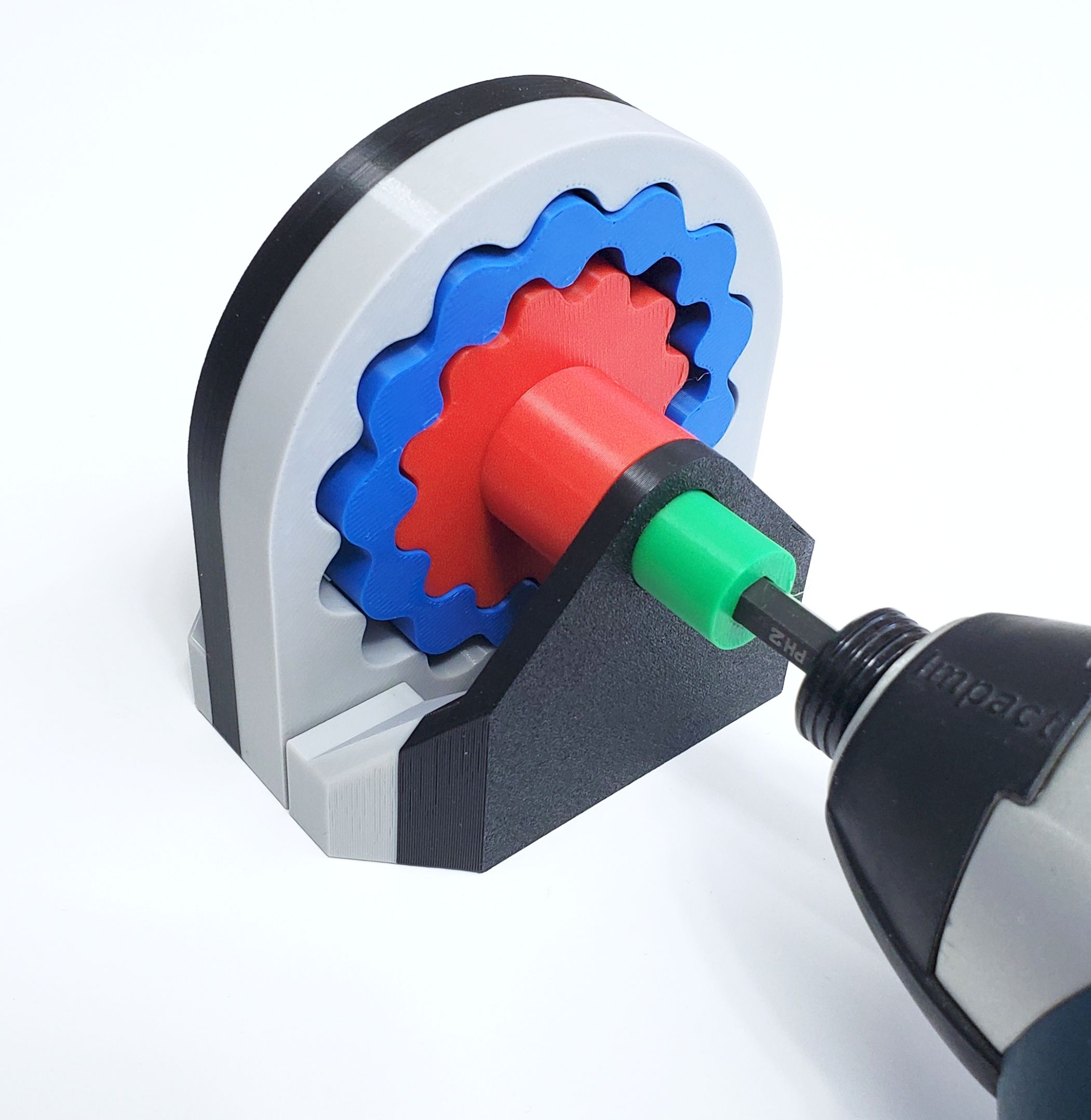
Cycloidal drives are a type of speed reducer that are significantly more compact than gearboxes, but they still come with a fair number of components. In comparison, the harmonic pin-ring drive that [Raph] recently came across as used in some TQ electric bicycles manages to significantly reduce the number of parts to just two discs. Naturally he had to 3D model his own version for printing a physical model to play with.
How exactly this pin-ring cycloidal drive works is explained well in the referenced [Pinkbike] article. Traditional cycloidal drives use load pins that help deal with the rather wobbly rotation from the eccentric input, but this makes for bulkier package that’s harder to shrink down. The change here is that the input force is transferred via two teethed discs that are 180° out of sync, thus not only cancelling out the wobble, but also being much more compact.
It appears to be a kind of strain wave gearing, which was first patented in 1957 by C.W. Musser and became famous under the Harmonic Drive name, seeing use by NASA in the Lunar Rover and beyond. Although not new technology by any means, having it get some more well-deserved attention is always worth it. If you want to play with the 3D model yourself, files are available both on GitHub and on MakerWorld.
The two gearboxes are the same size, and both have a 25:1 reduction ratio. The design uses the relatively cheap maker version of SolidWorks. Watching the software process is interesting, too. But the real meat of the video is the testing of the two designs.
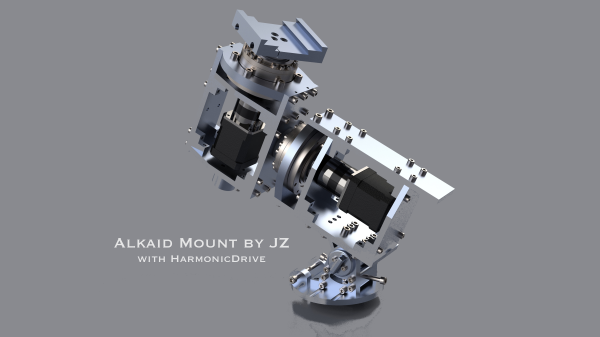
As an amateur astrophotographer will tell you, you just don’t get to capture the really interesting objects without spending a ton of money on some decent pieces of kit. Telescope aside, there really is a surprising amount of complexity, weight, and associated costs with the telescope mount alone, let alone one that is capable of any sort of programmable tracking. [Alan (Jialiang) Zhao] clearly wanted to up their game, and having suffered some of the shortcomings of their Sky-Watcher HEQ-5 pro Equatorial mount decided to go ahead and build an open-source mount, Alkaid, which hopefully works a bit better for them.
In simple terms, the difficulty of photographing an extremely dim, distant object (or one that is larger but diffuse) is that the camera sensor needs to spend a significant amount of time signal-averaging, to gather enough light for anything to be seen at all, through the noise. But, this ball of rock we sit on is rotating constantly, so the only solution is to track the object of interest, to compensate. This is referred to as equatorial tracking, and allows the rotation of the Earth to be compensated for during a long exposure.
The design of each of the two axes revolves (sorry!) around the use of a NEMA-17 stepper motor with a 27:1 planetary gearbox, driving into a harmonic reducer gearbox. Harmonic drives (aka strain wave drives) are pretty neat, working on the principle of a fixed, but circularly distorting ring gear that transmits torque from the inside surface to the outside, with almost no backlash. They are expensive parts, but for a super smooth movement, this is what you want. The huge output torque they allow, meant that [Alan] was able to build a mount for a heavy telescope without any counterbalances. Structurally, the whole thing is constructed from 10 mm thick aluminium plates that were cut with a waterjet and subsequently milled to finish.Continue reading “A DIY Equatorial Mount Using Harmonic Drives”→
3D-printed gearboxes are always an interesting design challenge, especially if you want to make them compact. [ZeroBacklash] created a little strain wave gearbox (harmonic drive) for when you want to trade speed for torque on NEMA 17 stepper motors.
Strain wave gears work by deforming a stationary flexible spline into an ellipse so the teeth engage the internal teeth of the output spline. Add a couple of extra teeth on the output side, and you get a high-reduction gearbox with fewer parts and reduced volume than equivalent spur gearing. Keeping the flexible spline stationery is achieved by making half of it engage with a stationary spline with the same number of teeth.
In this case, there are 60 teeth on the input side and 62 on the output, giving a gear ratio of 30:1. The flexible spline is deformed using a set of bearing balls and an elliptical plug on the shaft of the motor. It makes for a compact design that matches the frontal size of the stepper motor and is only about 27 mm long. [ZeroBacklash] has not released any design files, but the idea should be simple to replicate.
We’ve featured a couple of 3D printed harmonic drives of different sizes, but they usually use a pair of ball bearings as the wave generators, which doesn’t lend itself well to smaller designs.
3D printers are good for a lot of things, but making parts for power transmission doesn’t seem to be one of them. Oh sure, some light-duty gears and timing belt sprockets will work just fine when printed, but oftentimes squooshed plastic parts are just too compliant for serious power transmission use.
But that’s not a hard and fast rule. In fact, this 3D-printed strain-wave transmission relies on the flexibility of printed parts to work its torque amplification magic. In case you haven’t been briefed, strain-wave gearing uses a flexible externally toothed spline nested inside an internally toothed stationary gear. Inside the flexible spline is a wave generator, which is just a symmetrical cam that deforms the spline so that it engages with the outside gear. The result is a high ratio gear train that really beefs up the torque applied to the wave generator.
It took a couple of prototypes for [Brian Bocken] to dial in his version of the strain-wave drive. The PLA he used for the flexible spline worked, but wasn’t going to be good for the long haul. A second version using TPU proved better, but improvements to the motor mount were needed. The final version proved to pack a punch in the torque department, enough to move a car. Check it out in the video below.
Strain-wave gears have a lot of applications, especially in robotic arms and legs — very compact versions with the motor built right in would be great here. If you’re having trouble visualizing how they work, maybe a Lego version will clear things up.
[Zhihui Jun] is a name you’re going to want to remember because this Chinese maker has created quite probably one of the most complete open-source robot arms (video in Chinese with subtitles, embedded below) we’ve ever seen. This project has to be seen to be believed. Every aspect of the design from concept, mechanical CAD, electronics design and software covering embedded, 3D GUI, and so on, is the work of one maker, in just their spare time! Sound like we’re talking it up too much? Just watch the video and try to keep up!
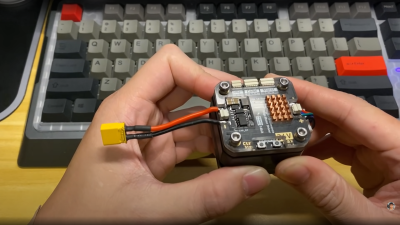
After an initial review of toy robots versus more industrial units, it was quickly decided that servos weren’t going to cut it – too little torque and lacking in precision. BLDC motors offer great precision and torque when paired with a good controller, but they are tricky to make small enough, so an off-the-shelf compact harmonic drive was selected and paired with a stepper motor to get the required performance. This was multiplied by six and dropped into some slick CNC machined aluminum parts to complete the mechanics. A custom closed-loop stepper controller mounts directly to the rear of each motor. That’s really nice too.
Stepper controller mounts on the motor rear – smart!
Control electronics are based around the STM32 using an ESP32 for Wi-Fi connectivity, but the pace of the video is so fast it’s hard to keep up with how much of the design operates. There is a brief mention that the controller runs the LiteOS kernel for Harmony OS, but no details we can find. The project GitHub has many of the gory details to pore over perhaps a bit light in places but the promise is made to expand that. For remote control, there’s a BLE-connected teaching device (called ‘Peak’) with a touch screen, again details pending. Oh, did we mention there’s a force-feedback (a PS5 Adaptive Trigger had to die for the cause) remote control unit that uses binocular cameras to track motion, with an AHRS setup giving orientation and that all this is powered by a Huawei Atlas edge AI processing system? This was greatly glossed over in the video like it was just some side-note not worth talking about. We hope details of that get made public soon!
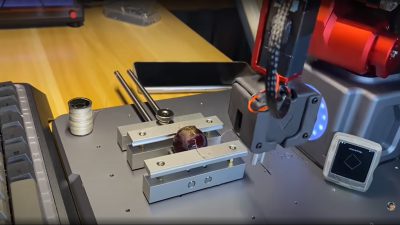
Threading a needle through a grape by remote control
The dedicated GUI, written in what looks like Unity, allows robot programming and motion planning, but since those harmonic drives are back-drivable, the robot can be moved by hand and record movements for replaying later. Some work with AR has been started, but that looks like early in the process, the features just keep on coming!
Quite frankly there is so much happening that it’s hard to summarise here and do the project any sort of justice, so to that end we suggest popping over to YT and taking a look for yourselves.
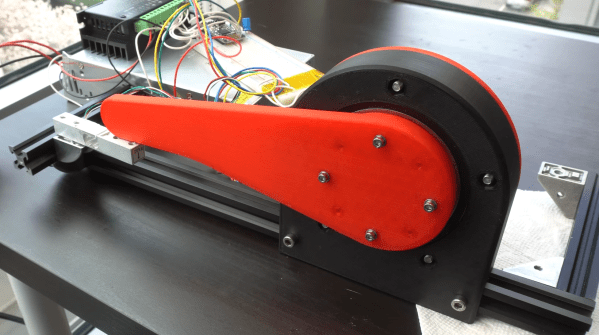
Actuators that are powerful, accurate, compact, and cheap are like unicorns. They don’t exist. Yet this is what [3DprintedLife] needed for a robotic camera arm, so he developed a custom 3D printed high torque strain wave gearbox to be powered by a cheap NEMA23 stepper motor.
Strain wave gears, otherwise known as harmonic drives, are not an uncommon topic here on Hackaday. The work by deforming a flexible toothed spline with a rotating elliptical part, which engages with the internal teeth of an outer spline. The outer spline has a few more teeth, causing the inner spline to rotate slowly compared to the input, achieving very high gear ratios. Usually, the flexible spline is quite long to allow it to flex at one end while still having a rigid mounting surface at the other end. [3DprintedLife] got around this by creating a separate rigid output spline, which also meshes with the flexible spline. Continue reading “A High Torque 3D Printed Harmonic Drive”→

 Cycloidal drives are a type of speed reducer that are significantly more compact than gearboxes, but they still come with a fair number of components. In comparison, the harmonic pin-ring drive that [Raph] recently came across as used in some TQ electric bicycles manages to significantly reduce the number of parts to just two discs. Naturally he had to 3D model his own version for printing a physical model to play with.
Cycloidal drives are a type of speed reducer that are significantly more compact than gearboxes, but they still come with a fair number of components. In comparison, the harmonic pin-ring drive that [Raph] recently came across as used in some TQ electric bicycles manages to significantly reduce the number of parts to just two discs. Naturally he had to 3D model his own version for printing a physical model to play with.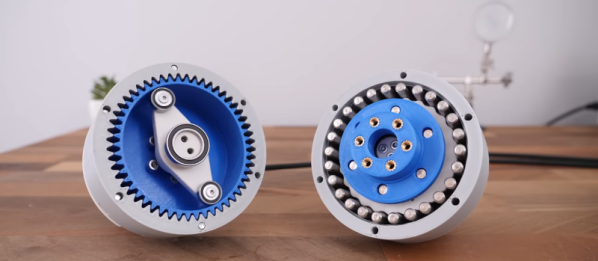
 for anything to be seen at all, through the noise. But, this ball of rock we sit on is rotating constantly, so the only solution is to track the object of interest, to compensate. This is referred to as equatorial tracking, and allows the rotation of the Earth to be compensated for during a long exposure.
for anything to be seen at all, through the noise. But, this ball of rock we sit on is rotating constantly, so the only solution is to track the object of interest, to compensate. This is referred to as equatorial tracking, and allows the rotation of the Earth to be compensated for during a long exposure.