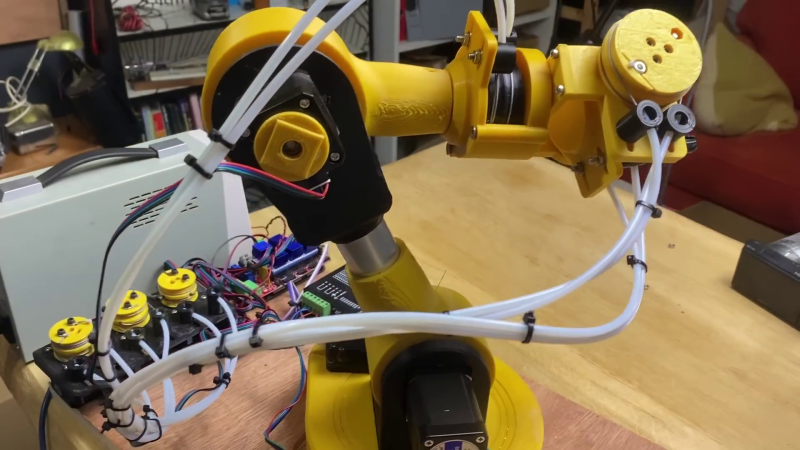
A major challenge of robotic arms is the weight of the actuators, especially closer to the end of the arm. The long lever arm means more torque is required from the other actuators, and everything flexes a bit more. To get around this, [RoTechnic] moved the wrist stepper motors off the arms entirely.
He built a push-pull mechanism that uses braided fishing line to transfer motion to the robot arm’s wrist using Bowden tubes. The motors are mounted on the arm’s base, with a drum and two lengths of fishing line on the shafts. The lines pass through an adjustable tensioner before entering the Bowden tubes. This drum mechanism is also present on each of the three rotating axes of the wrist.
[RoTechnic] used an Arduino-powered RAMPS board as a controller, which is programmed to accept over the serial interface. He created a simple GUI and scripting interface in Jupyter Labs to generate and send command, which seems like an excellent solution for testing.
We can see this mechanism being a useful for a variety of motion applications, and definitely something to add to the idea toolbox. It is somewhat similar to some other cable-operated joints we’ve seen in humanoid robots and other 3D printed arms.














Yes, but the point is lost because of the flexibility of the bowden cables, which is apparent at the end of the video where he simply touches the gimbal and it moves a quarter turn. Any load on the arm will just make it flop around uncontrollably.
Neat observation . With encoders and colse loop might work
With some success and difficulty. The intermediate solution is to tighten the cables, but the bowden tubes then become stiff and start to restrict movement. Whenever the cable is in tension, the entire tube has to be in compression, so it buckles and squeezes against the cable and makes friction.
The real solution is to route the cables as close as possible to the neutral axis of the arm sections using pulleys, so they impart minimum torque on the joints. You still get the problem of the cables acting like springs, but that’s an order of magnitude less than dealing with plastic tubes flopping about.
It’s a common mistake to think that you can “fix” mechanical problems and manufacturing defects in software with a clever algorithm.
Trouble is, your algorithm will only react to the error after it has occurred. You face two challenges: knowing or measuring what the system actually is regardless of wear, environmental conditions and varying loads, and only being able to react at the speed of your actuators. If you have spring or backlash, you cannot instantly turn the motor 50 degrees the other way to pick up the slack.
If you measure and predict in advance, how will you predict when the prediction will go wrong? Can you allow for that? E.g. picking up an empty milk carton believing it’s full.
That’s assuming you aren’t precalculating the necessary damping and applying it as its needed rather than afterwards. It is possible to front load the compensation calculations, and while the response isn’t mathematically perfect, the results when this is done are quite excellent.
One can look at pre-hydraulic equipment like steam-shovels (because they had steam engines and later internal combustion), which are entirely done (almost) with cables and drums and in ways that carry heavy loads and without excessive wear.
Dyneema cord is even stronger with less stretch than Kevlar. Kevlar has much higher working temperature but also is not so good with bends like pulleys. Dyneema has about 1/2 the young’s modulus as carbon steel and Kevlar is about 33% that of steel. Wouldn’t Dyneema be nearly as rigid under strain as steel ropes or rods? It is about 1/14 the mass for the same strength as steel rope.
BTW, the hanging length were Dyneema will fail under its own weight is 350km!
The tube buckling doesn’t seem to be an issue at all. In fact I’ve been experimenting with thinner (0.5mm wall thickness PTFE tubing) and that holds up just as well!
Ah I love it. Feedback would in fact be brilliant, but a very cool project.
The all mechanical setup reminds me of the Armatron toy – it was all gears.
https://en.m.wikipedia.org/wiki/Armatron
I remember being a kid and having the brilliant idea that I was going to put longer wires between that control panel and the arm, only opening it up and being disappointed by the myriad gears and mechanisms.
At the end of the video the motors were turned off, so I was just back driving the mechanism. It’s actually surprisingly strong with 0.8mm fishing line and won’t flop around with a camera on the end of the arm.
As an artist/engineer just starting with robotics to animate some of my mobile sculptures, can you suggest any open source designs that I may use to build relatively short legs as compared to a human form?
The main sculptural elments are being built in polystyrene…very light. The plan is to have multiple “legs” of 3 joints which will be synched together to move the piece/elements. Most legs will not need to have high torque ability.
I am an electrical engineer and understand programming, so I should be able to pick up the mechanical and motor design concepts quickly. I am just looking for pointers to get started down the correct path.
One of my needs/concerns is to have the legs move relatively quietly. Pricing is also important but not an extreme worry. Each leg can cost up to a few hundred dollars.
Thanks.
Genius. And smooth. As for the comment about the ‘tubes’, that is easily resolved.
The fishing line will most certainly stretch under load so the 1:1 turn ratio between the remote stepper motor and the “joint” on the arm will be lost very quickly.
Other than that, this is an okay implementation. But you may as well start looking at miniaturized pneumatic or hydraulic control systems…
It’s not the fishing line stretching. That is made of Kevlar or UHMWPE. It’s the plastic tube around the bowden cable that collapses, and maybe also general slop in the mechanism.
If you look at robotic arms from for example Kuka or Fanuc, then you see that the wrist motors are usually used as a counter weight for the under arm. That means that the shoulder joint has to bear this load, but that’s the biggest motor, and because it’s nearly stationary, the weight of that motor also does not matter.
I used to work on our fanuc paint bots at work. On the P-250 at least, the largest motor is in the base (joint 1).
Joints 2 & 3 (main arms) are a little smaller, as they don’t have as much weight to support.
The wrist motors (joints 4-6) are MUCH smaller (with joint 6 being the smallest) and are actually mounted up near the shoulder motor.
Any motion in the wrist is driven by an axel.
I liked that the team on that Tesla robot made a whole presentation on the technical aspects, and wonder if hobbyists can use any of their info, they show schematic representations of parts and I don’t know if anything can be gleaned from their designs and choices.