One of the challenges with humanoid robots, besides keeping them upright, is finding compact combinations of actuators and joint mechanisms that allow for good range of smooth motion while still having good strength. To achieve that researchers from the IRIM Lab at Korea University of Technology and Education developed the LIMS2-AMBIDEX robotic humanoid upper body that uses a combination of brushless motors, pulleys and some very interesting joint mechanisms. (Video, embedded below.)
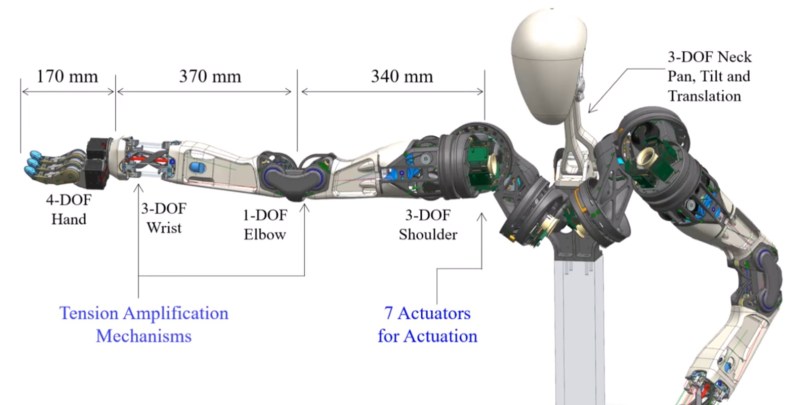
From shoulder to fingers, each arm has seven degrees of freedom which allows the robot to achieve some spectacularly smooth and realistic upper body motion. Except for the wrist rotation actuator, all the actuators are housed in the shoulders, and motion is transferred to the required joint through an array of cables and pulleys. This keeps the arm light and its inertia low, allowing the arms to move rapidly without breaking anything or toppling the entire robot.
The wrist and elbow mechanisms are especially interesting. The wrist emulates rolling contact between two spheres with only revolute joints. It also allows a drive shaft to pass down the centre of the mechanism and transfer rotating motion from one end to the other. The elbow is a rolling double jointed affair that allows true 180 degrees of rotation.
We have no idea why this took two years to end up in our YouTube feed, but we’re sure glad it finally did. Check out some of the demo videos after the break.
We’ve covered a few robots that emulates form factors from the natural world including Boston Dynamic’s robot dog and Disney’s backflipping robot.














Great idea and valued presentation, thought provoking, well done.
Thanks for posting :-)
a 3D-printed version of the wrist concept (from the gif), print the links with minimum supports in the middle – https://github.com/adamlukomski/parallelwrist
Awesome, thanks!
That elbow Joint is strongly reminiscent of some of the work done by [Nicholas Seward] He called them DLCJ (double lamnia compliant joint) https://www.youtube.com/watch?v=ixdUpbDNgqo later variations of it dropped the cable laminations in favor of gear teeth and it became the arm mechanism for his Gus Simpson printer design. https://www.youtube.com/watch?v=IEGTe1G2Gqs
Are 3d printed harmonic drives better than the cables?
Done: https://www.thingiverse.com/thing:3941099
This article inspired me to make a model of that interesting wrist joint. I’ve shared it at the Prusa web site–
https://www.prusaprinters.org/prints/8410-2-dof-3-link-robot-wrist-study-model
check out my humanoid robot arm I made a while back here https://youtu.be/f_90vhpQ1n8
I think every idea must be inspired by something. although my hand is very different there are some similarities and I’ve had my prototype done for a number of years now