Although no longer so common as during the heyday of the RepRap movement, it’s easier than ever to build your own largely-printed 3D printer, with designs such as Voron’s delivering excellent quality. Nevertheless, there are still niches to be filled by new designs, such as [Alex Yu]’s mostly-printed Encore design.
The Encore uses CoreXY kinematics and linear rails for the X and Y axes. Its has no internal frame; the linear rails are mounted directly to the side panels, which were printed but provided sufficient rigidity. The printer is modular, and all the parts are designed to fit within a 225 mm print bed. The Encore itself uses a 120 mm bed, a Bowden extruder, and a lightweight Bambu-style hotend. The drive motors are NEMA 17 stepper motors, and they use sliding mounts for belt tensioning. The power supply sits behind the rods supporting the Z axis, and the controller board is in the base of the printer.
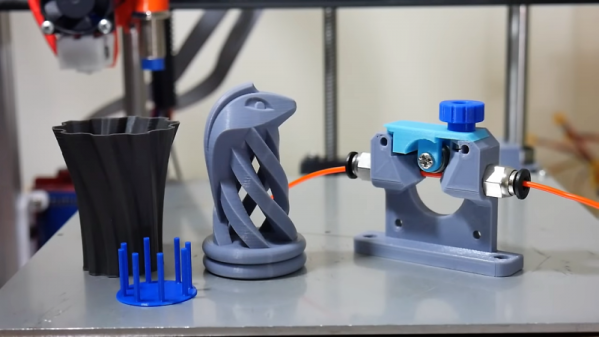
Building the printer was simple; tuning it, less so. The combination of a Bambu-type hotend with a Bowden extruder created some complications, and the hotend initially received too little cooling. [Alex] solved the cooling issues by using a stronger fan on the hotend, redesigning the ventilation shroud, and adding two inward-blowing fans along the sides of the build volume. After correcting some issues with Z-axis stability, the Encore produced some quite good-looking parts. [Alex] is still improving and documenting some aspects of the printer, but he’s uploaded his progress so far to GitHub.
We’ve seen some mostly-printed printers before, including a high-speed printer, one which printed all structural components, and one which was entirely 3D printed.