[Mark Dufour]’s TACO VR project is a sort of robotic platform that mimics an omnidirectional treadmill, and aims to provide a compact and easily transportable way to allow a user to walk naturally in VR.
 Unenthusiastic about most solutions for allowing a user to walk in VR, [Mark] took a completely different approach. The result is a robotic platform that fits inside a small area whose sides fold up for transport; when packed up, it resembles a taco. When deployed, the idea is to have two disc-like platforms always stay under a user’s feet, keeping the user in one place while they otherwise walk normally.
Unenthusiastic about most solutions for allowing a user to walk in VR, [Mark] took a completely different approach. The result is a robotic platform that fits inside a small area whose sides fold up for transport; when packed up, it resembles a taco. When deployed, the idea is to have two disc-like platforms always stay under a user’s feet, keeping the user in one place while they otherwise walk normally.
It’s an ambitious project, but [Mark] is up to the task and the project’s GitHub respository has everything needed to stay up to date, or get involved yourself. The hardware is mainly focused on functionality right now; certainly a fall or stumble while using the prototype looks like it would be uncomfortable at the very best, but the idea is innovative.

Locomotion issues as a whole are still not entirely solved problems in VR. It’s a space in which inspired hobbyists can absolutely experiment and innovate in a meaningful way. After all, the unique locomotion system in Gorilla Tag — a VR multiplayer game in which players are legless gorillas who move using only their arms — is a fantastic success and was the work of a single inspired developer. There’s definitely room for experimentation.
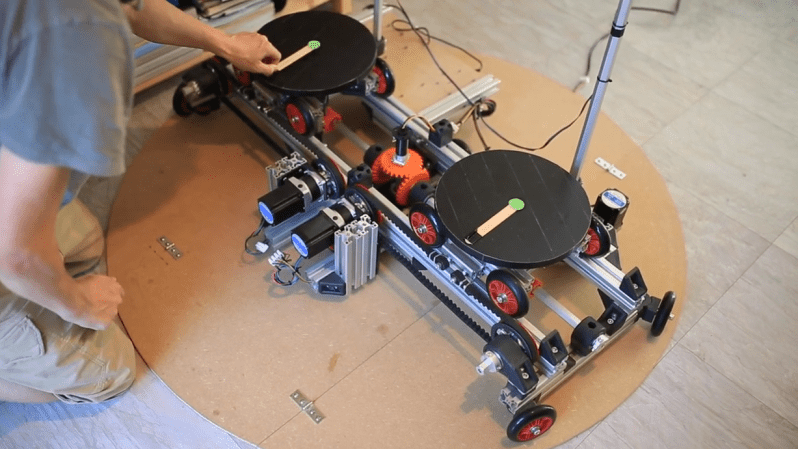
The TACO platform is a work in progress, but the pieces are coming together. You can see a test in the video below, in which two green markers represent a user’s feet. Watch the two platforms move and rotate as necessary to stay beneath the user’s (simulated) feet, meaning a user could walk normally, yet not move anywhere.













Scary to me, in a Kathy “Misery” Bates kinda way. Ankle twisting “never walk again” machine.
More or less so than a shocking spot? Nice T-Slot build though. That is one heavy taco. Cannot be the only one who is thinking what else this could be used for.
A spatial movement controller for some heavy RC machine? Where the operator needs to control spatial positioning and manipulators at the same time. Like a minesweeper bot, a rescue robot or some kind of space drone.
Reminds me of a scene from the Iron Man where the military tried to copy his armour and it snapped test pilots’ back.
The Taco is a nice fresh implementation though. Feels like it would work best as a controller for some threaded vehicle.
Although the additional size and weight would furthe hamper portability, a foam covered guard rail could be placed around the user to support them if they lose their balance.
I think this one has just enough smarts to simulate a twisted ankle in VR.
It would just take a while to do so though given the latency. Really needs to be redesigned in several ways though still a neat idea. Just not going to implement it with the current way it is being approached here.
I think this is a nearly-impossible kind of problem to solve. It’s impossible to make something that feels 100% natural and keeps you in place regardless of where you walk, because in order to do that, it has to move you, and you can feel yourself being moved, so it won’t feel completely natural. So you have to give up some of the natural feeling, which isn’t necessarily too bad, if you can keep it within an acceptable range.
I think the best kind of solution is one that allows you to move within a room-size area, but subtly tries to keep you centered, with less subtlety as you reach the edges. One thing that might help is to combine tilting with translation. If the user is standing near the edge, and you want to move him toward the center, you could try to simultaneously tilt the user toward the center while also accelerating him toward the center in order to cancel out the acceleration due to the tilt. Similarly, as the user reaches the middle, you’d want to do the opposite.
If you imagine holding a cup on a suspended tray, when you move the tray towards the left, the top of the tray also tilts toward the left, and the liquid level in the cup remains relatively undisturbed.
So not only do you need a two-dimensional powered treadmill, you also need a way to control the local tilt.
It’s probably, to a degree, technically doable but the cost and size and equipment needed would be extremely expensive and not even sure most of the technology is quite there either. There are some that are millions of dollars to train commercial pilots and they still lack “features”.
If you are looking to constantly reorient the user such that they always stay in the middle but feel they are actually moving and scale that to always work and allow for a host of changes so it is not only a flat surface and combine it with adding momentum and g forces and “feeling” correct to the user, it’s a huge project and then some. At that point you are almost getting into a fictional holodeck.
Combine VR with 6DOF and it’s at least progress but that too has a lot of work to do.
https://www.youtube.com/watch?v=1uzHazKkZ4o
Others have, well, quite a bit of work to do.
https://www.youtube.com/watch?v=xFSBXqlN86k
A solution would be a powered full exoskeleton attached to an industrial robot arm. But then a software error could easily kill you.
Can’t find the link at the moment but there was a paper (at siggraph I think) several years ago where they subtly moved the virtual world to make a user feel like they were walking in a straight line, but actually had them going in circle. If I remember correctly they used an eye tracker and rotated the world during saccades and blinks. No extra hardware needed. Made a 15’ volume feel like 50 or something like that.
Very interesting project!
What about using 2 holonomic platforms (using 4 mecanum wheels, or only 3 omniwheels)?
The design could be much simpler, and more robust…
Would be easier to put omni-wheels on your feet.
And lift a bunch of motors powerful enough to move an adult human around every step. No thanks
???
What’s so confusing? Gregg suggested putting Omni wheels on the user’s feet. If you want to use that to create a “walk in place” vr experience then those wheels need to be driven, quite fast, to bring the user back to the start point every step. And it needs to be able to drive them in 2 axes. Therefore you need something roughly comparable to an e-scooter, but with 2 motors, stayed to your leg and you need to lift it up every step. Not an attractive solution.
If they aren’t driven, what would the Omni wheels be used for exactly?
The reason room scale VR works is that the software replicates your actual motion, deftly sidestepping the ‘whole inner ear doesn’t agree’ puke problem.
If you are sliding around, you are not accelerating. Back to puking and falling on your ass in the puddle.
@Rabs, why do you want to lift the platforms? They stay on the ground, and follow your feet, as Mark’s design!
Usually, you have 3 motors@120° on an omni-wheel platform. Here, 6 motors. This is 2 more motors then needed, though, but I think the reduced complexity worth it.
If it seems too natural, what if you don’t know when it’s off/stopped as in 2018’s Johnny English Strikes Again? https://www.youtube.com/watch?v=epoHFveQ9lI
An alternative may be with augmented reality where you move about in a visible real environment with simulated objects & characters added.
Why not just put the user inside a large sphere that sits on three or more stationary spherical bearings. They can then walk in any direction inside the sphere which simply rotates on the bearings. The rotation in each dimension can be measured to determine where the user has ‘moved’
Just say “hamsterball” :D
Its mostly a size problem. To walk somewhat comfortably inside a ball it needs to be huuuuge.
Yes, it’s been done. Size is one problem, it ends up being more than one story tall, so won’t fit in most indoors spaces. The other problem (depending on your vr system) is how do you get the cables in to your vr headset through a continuous sphere?
You walk about on top of the sphere…
You use an Oculus Quest.
For moving slowly, that might be feasible. But, if you’ve ever observed a hamster running in a hamster wheel, and them suddenly stopping running, you’ll realize that what happens next isn’t the same as if the hamster just stopped running on flat ground.
Additionally, all the world isn’t just flat ground. There are hills and stairs and many other uneven surfaces.
This is very cool. Obviously the mechanics in this version aren’t going to work for any actual vr user, but they show the principle well. I’ve been kicking around ideas for something like this (2 foot tracking platforms) for a while but couldn’t come up with a mechanism that had the potential to be fast enough and cover the working space will enough for things like crossing feet, rapid turns or side stepping. I think this approach has legs – rotating the platform under each foot to align the other platform for the other for us a good idea.
Would love to see the calcs on the dynamics and inertias to keep up with an adult walking.
Try
Acclimating
Crap!
Ouch
I lol’d
Not practical and the build cost would be to high for a average purchase , not mention the fall by accidently stepping off the pad… Over you go… Great work for VR cost of average purchase will be out of reach for many..
this was built by someone who does not understand locomotion. im very doubtful this will ever work short of maiming its user.
I think it’s an interesting VR treadmill concept- though still wildly impractical.
This is in some ways similar to some older ideas where small independent wheeled robots would rush under your foot when taking a step, but with a much, much simpler (though still very complex) mechanical set up.
https://www.youtube.com/shorts/am355csVPoY
Red dwarf images came back to me reading this. I remember thinking how would I implement walking in vr like that when I watched it as a kid.