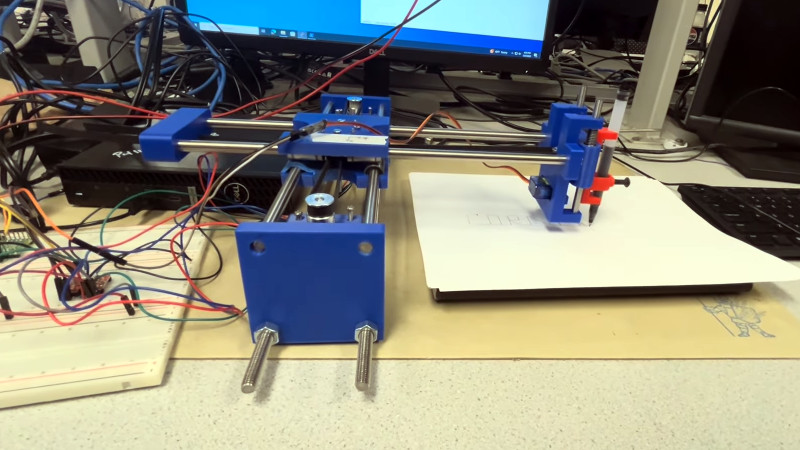
There are enough off-the-shelf CoreXY mechanisms out there that for the cost of an AliExpress order it’s possible to quickly and cheaply make yourself a plotter. But [Koushani Das], [Mahathi Andavolu] and [Dengyu Tu] are completing their project for Cornell University’s ECE 5730 course, so of course they have designed one from the ground up. Happily for us it seems to be fairly easy to replicate, so you can build one too if it takes your fancy.
The write-up makes for an interesting dive into the nitty-gritty of design, for which we hope they managed to secure a decent grade. The hardware itself seems pretty straightforward as does the pair of stepper controllers and RP2040 they use to run the thing, and their explanation of the math behind the CoreXY coordinate system is genuinely interesting for those of us who’ve never taken the time to consider it.
All the good stuff can be found in a GitHub repository if you’d like to take this further, and meanwhile they’ve also put up a demo video which you can see below the break. We like this little plotter, and we hope others will take its design and run with it.
Want more CoreXY explanation? We’re happy to oblige.














Using one core per motor is an ‘interesting’ way of doing things…
Since it moves on belts or cords, why isn’t it called CordXY ?
I am not understanding what’s different about the 2axis positioning system. They appear to have routed the belts in some way I can’t see that results in one motor controlling (X+Y) and one controlling (X-Y). I’m not sure how they did that. But even so why does this matter? There is a remark at one point in the video that this allows the apparatus to be smaller. I don’t know what that even means ( smaller than what alternative ? Or to achieve what constraint?).
Anyone understand ?
It’s pretty simple once you see a diagram like shown here: https://3ddistributed.com/corexy-3d-printer/corexy-kinematics/
The big advantage is both motors are stationary so you don’t have to push a lot of weight around and it can be very fast. Voron and Bambu 3D printers use it to get super fast printing. IMO, it is the future of 3D printing.
grblHAL allows you to use coreXY as an alternate to Cartesian kinematics. It is in a single .c file so is fairly easy to read. https://github.com/grblHAL/core/tree/master/kinematics You can select it from the web builder so one can try it out without having to install development environment. Works on the Pico. http://svn.io-engineering.com:8080/
Thanks. Now I get it. Cool. There’s some H configuration alternative too
Ditto!
“Unlike the hbot the corexy carriage isn’t problematic to twisting or buckling when x and y motors rotate in the same direction.”
in exchange, you have longer belts, thus belt-stretch is more of a challenge, and self-tensioning designs are harder to implement.
That’s a T-bot, a relative of the H-bot. These are also relatives of Core-XY.
See https://www.buildlog.net/blog/2017/10/the-midtbot-a-new-flavor-of-h-bot/