Venus hasn’t received nearly the same attention from space programs as Mars, largely due to its exceedingly hostile environment. Most electronics wouldn’t survive the 462 °C heat, never mind the intense atmospheric pressure and sulfuric acid clouds. With this in mind, NASA has been experimenting with the concept of a completely mechanical rover. The [Beardy Penguin] and a team of fellow students from the University of Southampton decided to try their hand at the concept—video after the break.
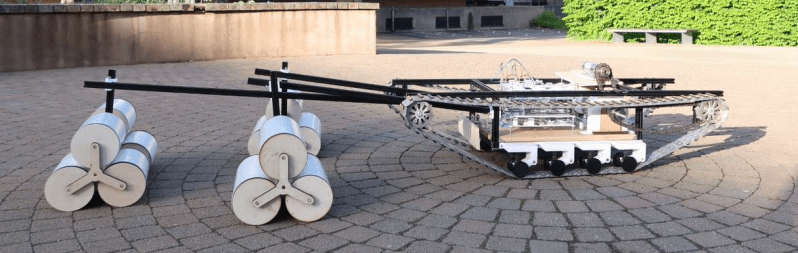
The project was divided into four subsystems: obstacle detection, mechanical computer, locomotion (tracks), and the drivetrain. The obstacle detection system consists of three (left, center, right) triple-rollers in front of the rover, which trigger inputs on the mechanical computer when it encounters an obstacle over a certain size. The inputs indicate the position of each roller (up/down) and the combination of inputs determines the appropriate maneuver to clear the obstacle. [Beardy Penguin] used Simulink to design the logic circuit, consisting of AND, OR, and NOT gates. The resulting 5-layer mechanical computer quickly ran into the limits of tolerances and friction, and the team eventually had trouble getting their design to work with the available input forces.
Due to the high-pressure atmosphere, an on-board wind turbine has long been proposed as a viable power source for a Venus rover. It wasn’t part of this project, so it was replaced with a comparable 40 W electric motor. The output from a logic circuit goes through a timing mechanism and into a planetary gearbox system. It changes output rotation direction by driving the planet gear carrier with the sun gear or locking it in a stationary position.
As with many undergraduate engineering projects, the physical results were mixed, but the educational value was immense. They got individual subsystems working, but not the fully integrated prototype. Even so, they received several awards for their project and even came third in an international Simulink challenge. It also allowed another team to continue their work and refine the subsystems.














In one of Carl Sagan’s books, which came out shortly after the two Pioneer space craft wandered out of the solar system, it contained a discussion one of the designs that Russia sent to that planet. The scientists Sagan spoke with about their bird, discovered they got back about six to eight minutes worth of data after landing. Problem was that the designs were pressurized inside to one atmosphere, ours. However the thing (both of them) was being crushed by several multiples of ours up there. Never mind of course the extremely acidic environment.
“Venus hasn’t received nearly the same attention from space programs as Mars, largely due to its exceedingly hostile environment. ”
Not from NASA/US, but the USSR had explored Venus with the Venera probes.
I’m speaking under correction, but I think it roughly was like this:
NASA/US was more into outer planet exploration, while USSR into exploration of inner planets.
The massive USSR probes also were better suited to withstand the huge pressure and heath on these planets.
NASA had good orbiters, though. Just their landers were a bit, uh, filigree.
NASA only attempted landing on Venus once, with Pioneer Venus 2, which carried several landers. They all reached the surface intact. As with the Venera landers, they didn’t last long on the surface.
ISTR The USSR focused on Venus because travel time to Venus was shorter than to Mars. They traced a bunch of Mars failures to electronics issues – the electronics simply didn’t survive long enough to reach the planet. Venus could be reached in less time, so the chance that the spacecraft still worked on arrival was higher.
“completely mechanical rover”
For the communication part, there is a cold war bug called “The Thing”.
A completely mechanical listening device that works with HF.
This could be used as microphone or for other sensors.
There’s an excellent program, The Secret Genius of Modern Life, on the BBC with Neil, G4DBN, where he replicates ‘the thing’ or Great Seal bug, its output was around 1.6GHz
I ask myself why the research approach was not to build a high-temperature computer. There are certainly components for this: https://www.sensortips.com/featured/electronics-operate-extreme-heat-800c-faq/
But that would probably have blown the budget by magnitudes. However, it would also have been possible to take just one part of this research approach and, for example, trying to develop a high-temperature transistor.
I also think a tracked vehicle is not very suitable because of the high friction.
Relay logic or tubes could be used, too. Tubes had been used in tanks and fighter jets before.
The military types or ceramic types are quite rugged.
Merely the heathing filament should be threaten with care.
Undervolting the heathing can greately extend life time of the tube.
Really, tubes are great for certain applications. Especially the small battery tubes are nifty.
They’re relatively mechanical stable, too. Ideally, They’re being mounted under metal cans that have springs.
would the tubes even need heaters on venus? or are they also providing an electron source for the tubes? i always assumed they were just heaters. the heaters are why tubes are so power hungry, so if you dont need them you can really reduce your power budget. camera tubes would probibly fare better than ccds.
silicon carbide semiconductors are also an option. i think the problem there is really the cost, unless there is a market for a hostile environment cpu. there probibly is if you look hard enough. “can operate on venus” would be a nifty bullet point on the marketing brochure. silicon carbide is used in a lot of power electronics and i suppose you could build a discreet cpu out of those. storage is an issue because nothing magnetic would work. maybe just transmit everything in real time and keep your data recorders in orbit. circuitry would need to be gold on ceramic.
The heating filaments provide, as you already mentioned/asked, the necessary electrons to function.
Yeah, but I think you’ve missed the point. You need the election emitting material, but you might not need to heat it given the high ambient temperatures. A larger problem might be other parts of the assembly emitting thermal elections you don’t want.
Combining a ‘dumb’ rover with high temperature electronics (solid state or vacuum tube) to a flying kite like station in the atmosphere that has the clever bits might give a way forward without requiring sophisticated processing at high temperatures.
Mechanics controlled by solenoids can get you a long way without requiring sophisticated electronics on the surface.
should point out that venus is above the curie point of a lot of magnetics. for example forget about neodymium. electromagnets should still work.
Venus Rover Concepts That Beat The Killer Atmosphere
Scott Manley
https://www.youtube.com/watch?v=1DEvcJgBy0c
Incredible New Electronics That Could Survive Venus Atmosphere
https://www.youtube.com/watch?v=2EFlRZSIBoI
You can buy SiC logic gates but they survive only 225°C: https://www.cissoid.com/products/high-temperature/logic-gates
MoS2 FETs (up to 550°C) are currently under research: https://pubs.acs.org/doi/10.1021/acsnano.3c13220
That’s fantastic! I am reminded that a MEMS based CPU that was originally designed to operate in extreme radioactive environments that could likely be made of high temperature materials.
However, trying to adapt technologies that are invented to work on Earth so that they will work on Venus seems kind of dumb because of how different they both are. I feel as if we should be looking for semiconductors that only work at high temperature ranges that Venus provides.
“I feel as if we should be looking for semiconductors that only work at high temperature ranges that Venus provides.”
But then you have the problem with pressure-less space, maybe.
The probe has to manage traveling to Venus from Earth, after all.
Earth has one atmosphere (1 atm) and a mild climate which isn’t that much away from vacuum of space in relationship to Venus.
By contrast, if it functions on Earth, so it will so in space, too.
Many cubesats in Earth LEO are merely naked PCBs without much insulstion and do work in either environment.
Making something that merely works in a hot, highly pressurized environment makes it difficult to do checks.
While the landing procedure in Venus orbit is undergoing, the probe faces differently pressurized atmospheres and temperature levels.
Treads are faaaaar too unreliable to be put on any extraterrestrial rover. This also seems to lack any form of redundancy which is a serious problem. It makes for a nice youtube video but I’m afraid not much more than that.
its why a lot of formerly tracked military vehicles now have wheels. driving techniques developed during offroading competitions could be used instead to get through rough terrain. of course probibly not suited for a billion dollar venus rover.
If there is no electronics suitable for venus, then there is no useful transmission of information bck to us and this is useless. If there is electronics then the mechanical computer may not be needed. Interesting idea though.
This was just a cunning attempt to have at least one undergraduate project not use an arduino or raspberry pi.
You can use morse code code-wheels to encode telemetry.
Morse ID keyers using a wheel, a motor and a ligh barrier had been used in 1950s or 60s by radio amateurs.
FM repeaters had used them to generate a morse code ID every 10 mins.
Before microprocessors had been used, there had been probes and satellites using multiple signal channels.
They’ve transmitted analog information, which was encoded using various modulation schemes together on a single radio signal.
The sensors itself were analog, such as thermal sensitive resistors (thermistors), photo resistors, photo cells (selenium cells), geiger tubes and so on.
This was all pre-Arduino tech, which many here maybe have problems to relate to (yeah kids, temperature could be measured without a DS18B20!)
In the 70s/80s/90s, though such components were still common in electronic construction kits for kids.
I think the original proposal for this project was to modulate a reflector on the robot, such that an orbiting satellite with a radar could provide the signal and read the response. You can’t send data to the robot, but you could get analog data back that way without needing any electronics on the robot.
its times like this i miss the kerbal space program forum. we had a whole thread or two about this.
anyway silicon carbide semiconductors show promise for the brains. and a one pixel mechanical camera slowly scans the horizon.
the real issue is power. the tempurature gradient is just so absurd that rtgs wont work, and solar wont work either because of the thick atmosphere and heat. so we kept going back to sails or a vetical axis wind turbine. one idea was to just bring a tank of liquid nitrogen and boil it off on the cold side of a sterling engine.
“anyway silicon carbide semiconductors show promise for the brains. and a one pixel mechanical camera slowly scans the horizon.”
Reminds me of a Nipkow wheel (mechanical tv), a drum scanner (fax, meteo satellites) or an flying spot scanner (used by SSTV amateurs).
https://en.wikipedia.org/wiki/Slow-scan_television
http://www.ha1zh.hu/en/sstvinfo.html
yeah, boiling off something cold was what struck me too. bring a cold sink, and operate until it’s saturated.
There are electronics being manufactured for operating on the surface of Venus… look into Ozark Integrated Circuits… they have received many development contracts from the military, jet engine oem’s and NASA
https://www.ozarkic.com/