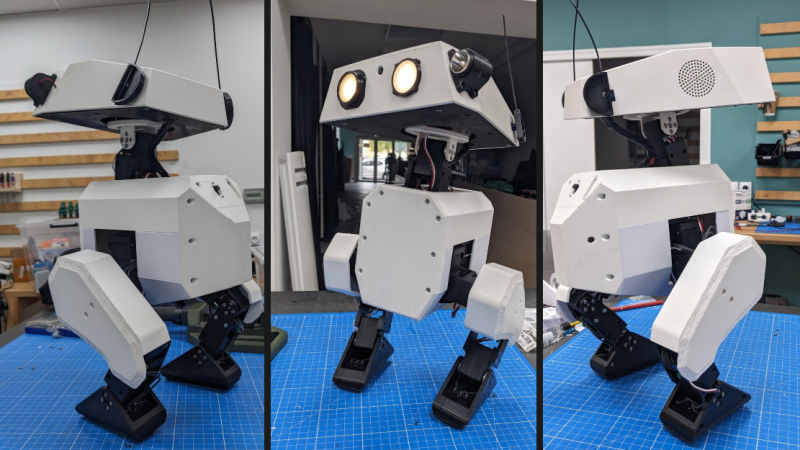
[Antoine Pirrone] and [Grégoire Passault] are making a DIY miniature re-imagining of Disney’s BDX droid design, and while it’s still early, there is definitely a lot of progress to see. Known as the Open Duck Mini v2 and coming in at a little over 40 cm tall, the project is expected to have a total cost of around 400 USD.

Bipedal robots are uncommon, and back in the day they were downright rare. One reason is that the state of controlled falling that makes up a walking gait isn’t exactly a plug-and-play feature.
Walking robots are much more common now, but gait control for legged robots is still a big design hurdle. This goes double for bipeds. That brings us to one of the interesting things about the Open Duck Mini v2: computer simulation of the design is playing a big role in bringing the project into reality.
It’s a work in progress but the repository collects all the design details and resources you could want, including CAD files, code, current bill of materials, and links to a Discord community. Hardware-wise, the main work is being done with very accessible parts: Raspberry Pi Zero 2W, fairly ordinary hobby servos, and an BNO055-based absolute orientation IMU.
So, how far along is the project? Open Duck Mini v2 is already waddling nicely and can remain impressively stable when shoved! (A “testing purposes” shove, anyway. Not a “kid being kinda mean to your robot” shove.)
Check out the videos to see it in action, and if you end up making your own, we want to hear about it, so remember to send us a tip!














Disney’s droids were co-developed with Nvidia and each carries an Nvidia Jetson Orin. They connect to a larger GPU-enabled server wirelessly and use the Nvidia Omniverse platform to run realtime AI models for their locomotion, audio generation, etc.
I feel like a Pi Zero is going to be a bit anemic for managing that sort of locomotion.
The real time models are only for the off board AMP training, once that Policy is generated, then it can be run locally with no need to connect to anything.
The Orins are not really being pushed at all to run the Policy, the Pi Zeros on the Mini-BDX are also running a similarly trained policy (using Mujoco this time) and they handle running the policy pretty well.
I have my own Mini-BDX above and have been contributing to the project.
For just locomotion you don’t need huge amounts of compute power, a Pi Zero is plenty to make it walk around on remote control on a flat concrete floor. It’s all the independent interaction and movement that takes the Jetson and separate server compute.
This is super cool. I really struggled with walking with EB-6. https://youtube.com/shorts/IKcDiu_h06M
Impressive-I love it!