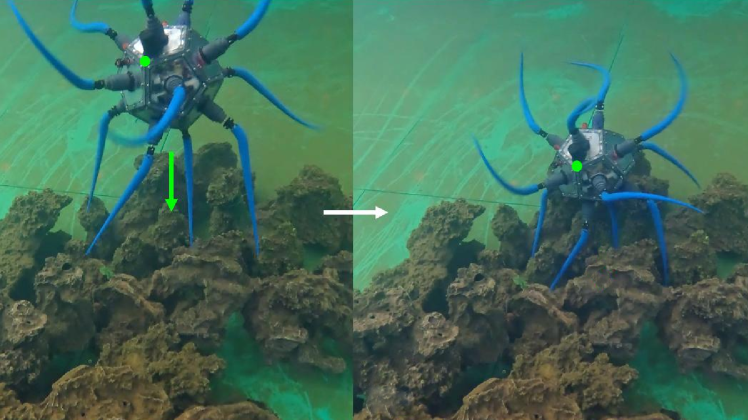
Underwater robots face many challenges, not least of which is how to move around. ZodiAq is a prototype underwater soft robot (link is to research paper) that takes an unusual approach to this problem: multiple flexible appendages. The result is a pretty unconventional-looking device that can not only get around effectively, but can do so without disturbing marine life.
ZodiAq sports a soft flexible appendage from each of its twelve faces, but they aren’t articulated like you might think. Despite this, the device can crawl and swim.

Each soft appendage is connected to a motor, which rotates the attached appendage. This low-frequency but high-torque rotation, combined with the fact that each appendage has a 45° bend to it, has each acting as a rotor. Rotation of the appendages acts on the surrounding fluid, generating thrust. When used together in the right way, these appendages allow the unit to move in a perfectly controllable manner.
This locomotion method is directly inspired by the swimming gait of bacterial flagella, which the paper mentions are regarded as the only example of a biological “wheel”.
How fast can it go? The prototype covers a distance of two body lengths every fifteen seconds. True, it’s no speed demon compared to a propeller, but it doesn’t disturb marine life or environments as it moves around. This method of movement has a lot going for it. It’s adaptable and doesn’t use all twelve appendages at once; so there’s redundancy built in. If some get damaged or go missing, it can still move, just slower.
ZodiAq‘s design strikes us as a very accessible concept, should any aspiring marine robot hackers wish to give it a shot. We’ve seen other highly innovative and beautiful underwater designs as well, like body-length undulating fins and articulated soft arms.
We do notice that since it lacks a “front” — it might be a challenge to decide how to mount something like a camera. If you have any ideas, share them in the comments.














If I saw this whilst swimming, I’d release my brown ink.
I guess snorkeling is not for you. There´s much more (scary for you) fascinating things down there than a simple giant dinoflagellate…
Indeed. A whole school of brown-trout. Creepy!
You know, it’s remarks like that… that make make my internet connection worth paying for.
Thank you for painting a moustache on the Mona Lisa of my mind.
Obligatory XKCD, erm, I mean SMBC: http://www.smbc-comics.com/comic/evolution-9
This article would benefit greatly from a video that shows the thing actually moving in different directions.
that’s not very positive, but still you’re here…
+1000
But there´s no video in the research article. Fortunately science does not work like Yt (yet)
You aren’t wrong but the source (a research paper) does not provide one. However, you can view the behavior of it’s “digital twin” using the simulation data from https://github.com/SoRoSim/SoRoSim/tree/ZodiAq which runs on matlab.
Here you go:
https://www.youtube.com/watch?v=tsnw3pcylto
Interesting idea, it does move, but not incredibly well. I feel there is still a lot more to explore in how it moves (from the software side of things). which may unlock better movement.
I do love biomimicry, glad somebody tried this.
Thank you very much for that link.
It confirms my suspicion. Movement is very slow, even in the 3x sped up video.
I guess that energy efficiency is also low, with all that water getting pushed around in all the wrong directions. But still, it’s “different”, maybe it will find some useful application some day…
Made me remember those Matrix little flying robots
They are using an “acoustic modem” to communicate to the drone (?). That’s pretty cool, I had never heard of an acoustic modem before, but it kinda makes sense in underwater applications.
Also its a lot less complex than I expected, the 12 legs are actually rigid and rotate to induce motion. Still I love it
One major issue with using accoustic POTS modem underwater is how sound vibrations don’t dissipate like they do in air. Over time those vibrations tend to cause plastic to delaminate and fail – this is what caused Oceangate submarine to explode. (And why Cameron used subs connected by a long cable.)
“this is what caused Oceangate submarine to explode.” False.
“And why Cameron used subs connected by a long cable.” Also false.
Cables are used to increase the bandwidth of connections to the sub, and make them easier to locate should something go wrong. Note, an underwater acoustic modem has a baud rate of around 250 to 5000bps (basically enough for texting, slowly).
You’ve never heard of an acoustic modem?… I must be old, I used to just call those a “modem.”
https://en.wikipedia.org/wiki/Acoustic_coupler
I wonder how much baud rate you could get out of an old sonar unit
This is way cool
If this works in water, with some modification it can work in air too.
Small nit to pick, I don’t think this is a “research paper” by my arbitrary definition- it doesn’t appear to be in a peer reviewed journal. I’d call it a whitepaper or something else.
The linked article itself references video S5 of the supplements, which is supposed to show it working. This doesn’t exist as far as I can tell.
Cool stuff thanks.
Huh. Learned that if I type a numbered list, the numbers disappear when I hit “submit.” interesting/why?!
It appeared in “Soft Robotics”:
https://www.liebertpub.com/doi/full/10.1089/soro.2024.0036
But that’s behind a paywall.
What a pity that they did not upload the video to arXiv.org
Well now! It is indeed a research paper so I got myself down to the Uni and looked at the videos.
They look exactly as one would imagine- that little robot gets flailing all over and indeed gets places. It’s amusing but if anyone is thinking you missed out- not so much. Imagine a really inefficient propeller. Still cool and still darn novel.
some of the robo stuff was already making me twitchy enough to start considering what sort of ordinance to carry, but now I have to learn up on spear guns
then again maybe just gearing up s long wave magnetic pulse gun, and setting it off, continiously is a better idea
robo drone sleepy time…..
Bright IR LEDs on hat/license plate frame are useful.
Current battery tech does not allow for any armor on robots (unless they are ICE like those weapons platforms on treads)
Hit a hydraulic line, motor, battery, cable etc and you will disable it. Probably anything over 22lr will drop a Boston dynamics bot
Imo if you’re set for 2 legged critters you’re good for any robots rn
One camera per face plate => spherically complete field of vision.
how large and maneuverable are those tentacles. asking for a friend.