When you think of robots that were modeled after animals, a brittle star is probably not the first species that comes to mind. Still, this is the animal that inspired [Zach J. Patterson] and his research colleagues from Carnegie Mellon University for their underwater crawling robot PATRICK.
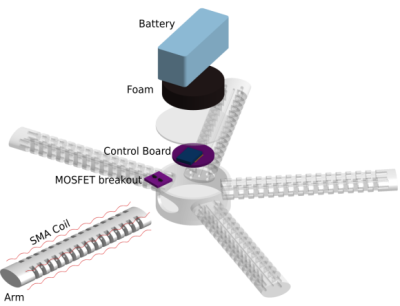
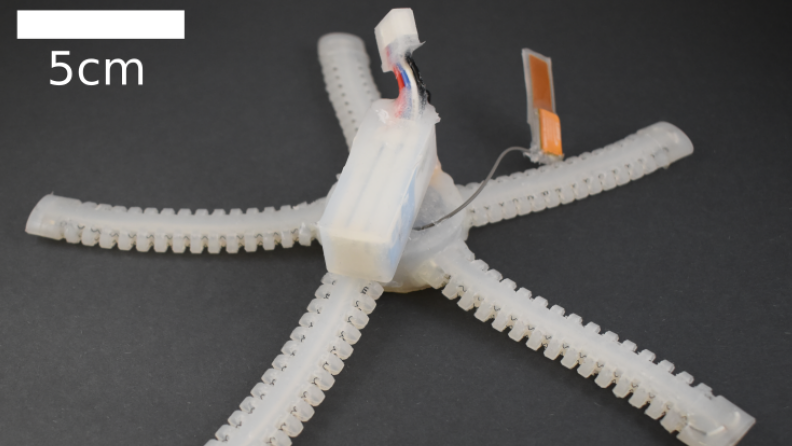
PATRICK is a soft robot made from molded silicone. Each of his five limbs contains several shape memory alloy (SMA) springs which can be contracted through Joule heating thereby causing the limbs to bend. The robot’s control board is sending and receiving commands via Bluetooth Low Energy from a nearby computer. To control PATRICK’s motion the researchers constructed a closed-loop system where an offboard OpenCV based camera system is constantly tracking the robot. As shown in the video below with an average velocity of 1 cm/s, PATRICK’s movement is a bit sluggish but the system is supposedly very robust against uncertainties in the environment.
In the future [Zach J. Patterson et al.] would like to improve their design by giving the robot the ability to grasp objects. Ultimately, also the offboard camera should be replaced with onboard sensors so that PATRICK can navigate autonomously.
Soft robots like artificial jellyfish are especially useful underwater and sometimes almost cross the boundary to organic life.














But… can it eat mussels [1], too?
[1] https://en.wikipedia.org/wiki/File:Starfishmussel.jpg
Neat build, but the poor thing does look like a fish out of water. Also how good is the RF communication with it when it is underwater by more than a few feet?
Lol, thanks for the comment reg. I agree, it is not the most graceful robot at the moment. We have some improvements, but deadlines often force ya to put out suboptimal stuff! That being said, we actually take a big positive out of the fact that although it can sometimes flop about unpredictably: it is still able to reach the goal, which points to the promise of using highly deformable materials to build robots. You might imagine that a rigid robot under similar circumstances and uncertainty would crash and break, but ours is able to keep moving as if nothing happened. We still have a long way to go, but the ability to robustly respond to the uncertainty in both the environment and the structure of the robot itself gets at the heart of the promise that we see in deformable robots!
Best,
Zach
Lol, thanks for your comment reg. I agree, it is not the most graceful robot in the world at the moment. We do have improvements in the works to drastically improve performance, but deadlines sometimes force you to put out suboptimal stuff!. That being said, we take a positive view here that gets to the heart of the promise that we see in deformable robots: although the robot is sometimes a bit floppy and we don’t always know how it will move, it is still able to reach the goal because the deformable structure allows it to robustly respond to uncertainty in the environment and in its own structure, despite very naive control.
Zach
Hey! I happen to be one of the co-authors on this paper – we just found out this got on hackaday (whoa!).
To answer your question – yes, BLE is terrible underwater. With the default radio settings, the connection severs when the robot is placed underwater. We cranked up the TX power on the onboard microcontroller, and with just a few inches of water between the robot and the bluetooth receiver, it works well enough. Right now, our test setup is only 5 inches deep, so if we do deeper tests, we’ll be switching to something lower-frequency.
“No, this is Hackaday!”
…sorry, couldn’t resist…
Could it be used as a robot hand? Give Patrick a handj… still it’s a valid idea.
TVTropes has an entry called “Starfish Robots” for robots that are blatantly not humanoid, but they usually didn’t mean this literally.
Does the robot has any toxic materials?
scalability?Durability, fatigue, lifetime of devices, how stable is device with respect to power?