Robotic arms have a lot in common with CNC machines in that they are usually driven by a fixed script of specific positions to move to, and actions to perform. Autonomous behavior isn’t the norm, especially not for hobby-level robotics. That’s changing rapidly with LeRobot, an open-source machine learning framework from the Hugging Face community.

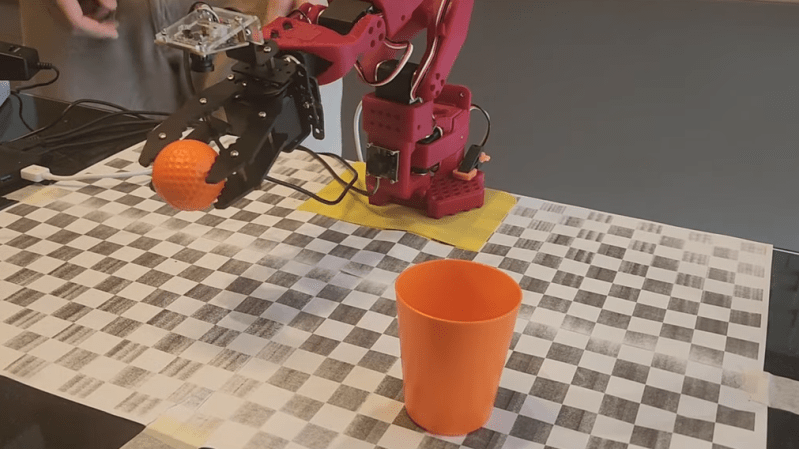
If a quick browse of the project page still leaves you with questions, you’re not alone. Thankfully, [Ilia] has a fantastic video that explains and demonstrates the fundamentals wonderfully. In it, he shows how LeRobot allows one to train an economical 3D-printed robotic arm by example, teaching it to perform a task autonomously. In this case, the task is picking up a ball and putting it into a cup.
[Ilia] first builds a dataset by manually operating the arm to pick up a ball and place it in a cup. Then, with a dataset consisting of only about fifty such examples, he creates a machine learning model capable of driving the arm to autonomously pick up a ball and place it in a cup, regardless of where the ball and cup actually are. It even gracefully handles things like color changes and [Ilia] moving the cup and ball around mid-task. You can skip directly to 34:16 to see this autonomous behavior in action, but we do recommend watching the whole video for a highly accessible yet deeply technical overview.
LeRobot is a very flexible framework, capable of much more than just doing imitation learning on 3D-printed low-cost robot arms. But the main goal is to make this sort of thing accessible to just about anyone, as [Ilia] aptly demonstrates. We have seen tons of high-quality DIY robot arms, and since the LeRobot framework is both developing quickly and isn’t tied to any particular hardware, it might be powering the next robot project sooner than you think.














Going to have to find 50 Sarah Connors now…
I’ve been working, occasionally, on an autonomous drone/robot to pick up dog poop in the backyard then deposit in a container. The top picture with dual cameras looks promising.
Train dog to go on checkerboard?
You could build a robot that drives around, detects poop and sprays it with sulfuric acid until it disappears.
Just program it to ‘handle’ the poop with a 40mm grenade launcher and mini gun.
What can go wrong?
Just:
Use AI to identify poop.
Outsource AI training to internet randos.
Done!
Going public!
Think of it as a real world version of ‘CoreWars’.
With AI, machine guns, Btards and Antifatards.
Of course, the whole ‘Train Funnybot’s AI site’ would be a tar baby.
Those playing would either be recruited by the feds or sent to prison.
‘Conspiracy’ is a bitch.
Doesn’t matter that all but one person in conspiracy is fed, that one person is bound for federal prison.
The SO-100 and SO-101 arms are built around the Feetech/Waveshare ST3215 servo, which can be bought very cheaply from the usual sites. I have built one (two, in fact, as you the project consists of both a follower and leader arm), and it is a great fun summer project to do with your kids.
Shameless plug: as a consequence, I built a portable version of the configuration and debug GUI for the servo, here: https://github.com/dgmz/feetech-servo-tool. Give it a try if you use this servos.