[Dan Royer] has noticed that most university projects involving a Stewart platform spend more time building a platform than on the project itself. He hopes to build a standard platform universities can use as the basis for other projects.
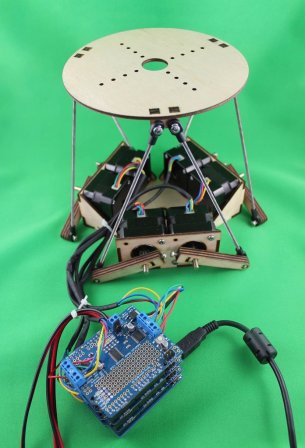
Stewart platforms are six degree of freedom platforms often seen hefting flight simulators or telescopes. The layout of the actuators allows movements in X,Y,and Z as well as pitch, roll and yaw. While large platforms often use hydraulic systems to accelerate heavy loads quickly. [Dan] is looking at a smaller scale system. His platform is built of laser cut wood and uses six steppers to control motion.
One of the harder parts in designing a platform such as this is creating a mechanical system that is strong, precise, and smooth. With so many linkages, it’s easy to see how binding joints could bring the entire thing to a grinding halt. [Dan] is currently using RC helicopter ball joints, but he’s on the lookout for something even smoother.
For locomotion, stepper motors are more than adequate – providing both the quick acceleration and holding torque needed to control the platform. Adafruit’s stepper motor controller boards provide the drive from an Arduino. The bottleneck in all of this is the i2C link with control of 6 steppers limiting the overall speed of the platform.
Software is another big issue on Stewart platforms. Kinematics of 6 DOF platforms are no easy task. To this end, [Dan] has gone open source. His Gcode demo is available at github.















Awesomely cool platform!! LinuxCNC should be controlling that from a BeagleBone!
http://www.youtube.com/watch?v=9xMoXywKyOs works fine as here on this robot :)
Wow, DDOS’d already. I hope it have it fixed now.
HaDOS’d
Control is probably quite difficult since the servo arm/strut joint is underactuated.
I would absolutely love to get my hands on just the struts with those ball joints on either end! Does anyone know if these are off the shelf items somewhere?
Do you mean the ball joint with threaded rod screwed into them?
Get them in packs of 10 for a dollar or two at most hobby stores. They are all over RC helicopters in particular.
Thanks, Ryan. What’s the proper name to look them up by? Struts, linkages, what are they?
At hobby shops they’re best known as Ball Links. Du-bro products are one of the major manufacturers. That just covers the ends though – you’ll also need to get the threaded rod, which will probably be in the same area. You cut down the rod, and then install the two ball ends.
Threaded swivel ball links. Tamiya makes some small ones that are nice: “70171 3mm Threaded Shaft Set” Available on Pololu.com
Also known as rose joints
Interesting: as soon as you start looking for “rose joints”, your price level goes x 10 up but the quality also seems to improve
I got Traxxas ball joints for this model. They came in two 6-packs. about $1 each.
I done something similar (with more aluminium) for my engineering degree grade thesis project. Here a little video of my tests http://www.youtube.com/watch?v=sfXLspqrfJE
A better universal joint might be a Magnetic universal joint. People building Delta 3D printers have had great success with them – see http://forum.seemecnc.com/viewtopic.php?t=1704
That link was awesome, I could see that being used in a lot of different applications. Thank you.
Started reading the forum, couldn’t find the part supplier. Direct link, please?
i need to know what materials must used to make an 3-d of stewart plateform ?
can anybody provide dimensions of platform so that is can be made in CAD software.