[Boston Dynamics] has been just full of videos over the last few days. They’ve dropped updates on Atlas and LS3 in addition to the WildCat update we already featured.
This video shows updates to the Atlas robot. This is to be a simplified version of the atlas, as compared to the robots sent off to competitors in the DARPA robotics challenge. Arms have been replaced with weights. It appears that this update focuses on Atlas’ balancing and handling on rough terrain. Atlas walks gingerly, over some crushed cinder blocks – possibly the same ones we saw BigDog throwing around recently. There are a few tense moments, but Atlas manages to get through unscathed.
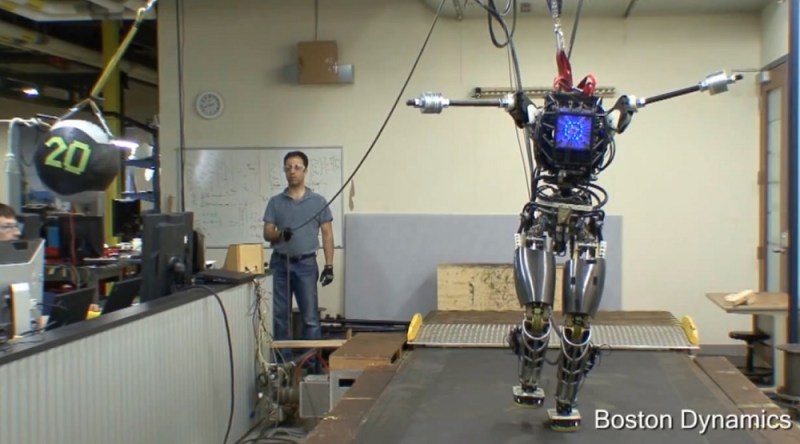
The real scary part (for us) is watching Atlas get hit with a weighted ball. We’re assuming the 20 on the ball indicates pounds. Imagine getting hit from the side with a 20lb swinging weight. Would you be able to stand up? Did we mention Atlas did this all while standing on one foot? Atlas takes it in stride though – waving its arms to maintain balance in a very human manner. Notable is the balance system. Atlas never lifts its foot off the ground. This is slightly different from the bouncing/hopping system of balance we’ve come to know and love in [Boston Dynamics’] other robots.















Very bad ass. I am somewhat creeped out at the “horse/dog” version of this. I think it was called “big dog” ? Anyways, I’m not sure exactly why they give that creepy feeling but I think it’s in the movement of these things…some inherently creepy about it.
http://en.wikipedia.org/wiki/Uncanny_valley
impressive.
The creepiness comes from “The uncanny valley”. Read the book, it’s really interesting stuff.
On a different note, this is clearly VERY impressive engineering, but why make something so complicated, expensive, and energy wasting, when wheeled vehicles can do the same job with 2 orders of magnitude lower cost and increased efficiency, and an order of magnitude fewer moving parts? I completely understand and accept the coolness factor, but I don’t get the military’s interest in legged locomotion.
Because there are still places in this world accessible only by foot.
Where?
Remember to be sure to be comparing apples to apples, so the wheeled vehicle would be about the same size as atlas.
You need to consider where a soldier would be expected to go:
* Up a rock face
* Up a tree
* Across a ditch
* Through a narrow (VERY narrow) tunnel
etc..
Wouldnt a QUAD copter handle this even better… get into smaller spaces and high places. Why climb? when you can fly! Energy harvesting should be simple.. for re-charging… also its way faster and can out maneuver both human and car/tank,
@atomsoft
Can a QUAD open doores?
Can a QUAD carry a general-purpose machine gun to kill someone?
Can a QUAD build some traps?
Not yet.
I think the point is as a rule you are fighting people. to be effective you need to do what people can do, like climb a ladder. Wheels can do allot, as long as you can vary the details, radius, tire tread, tread pattern, tread material etc. The benefit comes via being able to do more with zero variability. I can step over a 1 inch step, or a 6 foot step with the same hw.
A wheel can be engineered to do virtually anything. A person can do it with practice.
I talked to the folks at WPI about their Atlas robot. Even they said the robots that will win the latest Darpa competition will not be humanoid. Climbing a ladder does not require human dexterity. Think outside the box. Where does the ladder go? Does the robot really need to climb it? Maybe the robot could hop up to the top, or grab the top rung with a single purpose-built device and pull itself up in one motion. Or maybe it’s a blob or inflatable and oozes its way up (full disclosure: this concept belongs to someone else).
The point is: having the wide ranging capability of human dexterity is overkill for most tasks.
And purpose building robots to tasks, is prohibitive in its own right for multiple reasons. But if you have a chasi that works all that is missing is the AI for it to be as versatile as a human is. These are all research. I wouldn’t expect atlas to win the latest comp,
These robots, like the Asimo, aren’t a massive amount of actual use. But they’re the grandfathers of our eventual android slaves / masters. If you want to build fully useful, smart, agile, versatile robots, you have to start with clunky stupid ones first, and build up.
Very little of this particular robot might end up put into practice, probably the same with the various Dog things. But getting the plans some exercise means we can tick problems off the list one by one. Just this test alone will help future androids not fall over as easily. They’ll need that.
Boston Dynamics videos remind me of both the Combine from Half Life and the MNU lab from District 9. I’m reminded of a comedian made the joke about the Nazi SS, ” Did they not look at their uniforms, see the skulls and stuff and ask themselves ‘hey you ever think we might be the bad guys?’ “, I think the same whenever I see these freaky military monstrous robots, they appear to be designed to be more menacing, than practical energy efficient vehicles. One of these things with a gun strapped to it’s back and a remote operator, patrolling the streets of Yemin, ready to unleash deadly force at a moments notice. It’s intimidation on the level of ED 209 from Robocop. As engineers we need to start asking ourselves some serious questions about the applications of these cool toys after they leave the lab, and fall into the hands of military generals who think nothing of wiretapping and monitoring private the communications of the citizens whose rights they are sworn to protect.
I’d hate to have to fight it.
http://www.youtube.com/watch?v=hn1VxaMEjRU
Can a wheeled robot climb into a fire truck and drive it next to a burning nuclear reactor, then pick up the hose and start spraying it down?
A wheeled robot would be the truck.
No, a wheeled robot would be an extremely expensive purpose-built truck. Having humanoid robot is like having truly universal remote controller – anything built for human operation becomes robotized at the moment humanoid robot gets a hold of it. You save tons of money NOT having to develop a robot-a-purpose. Design stuff for humans, then design robot to emulate human side of HM interface.
The humanoid robot’s cost far outweighs the cost to modify a firetruck to be autonomous. Robot-per-purpose IS the way to go.
Its obvious Transformers are the future..
“The humanoid robot’s cost far outweighs the cost to modify a firetruck to be autonomous. Robot-per-purpose IS the way to go.”
The robotic fire truck still wouldn’t be able to pull its own hose and enter a building with it, unless you also built it a companion robot to drag and aim the hose, and a companion robot for that to carry a hatchet to break down the door, and a companion robot for that to pick up the debris so the hose carrying robot can get in…
This is the classic settler vs. spacer debate :D
Dax, you’d build the hose carrying robot with an axe AND a shovel so it can clear it’s own damn path. Non-humanoid robots can have a dozen arms if needed, and could easily stably carry much more weight than a humanoid robot.
At the moment its cheaper to build a bespoke package to preform set tasks, but unless you do the R&D the prices will never drop.
“you’d build the hose carrying robot with an axe AND a shovel so it can clear it’s own damn path.”
But that’s no longer “a robot for a purpose”. It’s one multi-purpose robot. If you go that way, it’s cheaper to make the one robot drive the truck as well rather than have specialized robotic firetrucks just for that one purpose.
Human interfaces are for humans. Building interfaces in both directions, machine -> human -> human -> machine is stupid. A robot doesn’t need to work a steering wheel. Give it an ODB plug and wire it into the truck’s driving mechanism directly. Better, faster, more accurate, much, much less SNAFU and a lot less FUBAR too.
In fact a “robot” brain plugged in by a wire is actually a computer. So put a computer in the fire truck. A hundred times cheaper and better than building robot truck drivers. Or were you thinking of having general-purpose robots queue up in the Job Centre, collecting oil vouchers and eating government-provided electricity?
A machine that can do everything has to have dozens capabilities it’ll never use, or only use once, in it’s life. That’s why we build separate machines for each purpose.
Humans do well at our purpose, but we’re not really here for box-stacking or car-assembly. We only did that while we waited for the robots to be invented.
A properly designed nuclear installation should not need that, either it has sprinklers and such for normal fires, and when things REALLY go bad then the thing becomes too complex for a robot when everything including the road is mangled and distorted and hard radiation messes up electronics and heat makes it hard to be near it and steam and smoke prevent you to see anything.
Prevents you from seeing anything I meant to say,. Excuse the odd sentence.
Have you not seen iron man?!
” Would you be able to stand up?”
Yes I would, if I was 330 pounds. It’s all about the relative weight of the ball. For normal people, that would be like getting bumped by a swinging 10 pound dumbbell, which you can pick up and swing around with your hand quite freely and find that you’re easily able to stand on one leg.
Have there been any indications of applying this to use with the handicapped? This could be an excellent way to increase mobility. As someone above mentioned – this can go up stairs, and through tighter openings than current wheeled mobility aids.
No Miley Cyrus jokes jet? I’m proud!
Why is there no “Wrecking Ball” audio overlay!!!
“The humanoid robot’s cost far outweighs the cost to modify a firetruck to be autonomous. Robot-per-purpose IS the way to go.”
Actually, the cheapest solution is humans. You can feed them for almost next to nothing, pay them almost next to nothing, and when they die, you can just bury them.
Heh. Add mules to that and you get a really cheap high-mobility army.
Can’t quite figure out how to work Miley Cyrus into this conversation. Maybe if she was out front of the advancing troops, they’d be more motivated to charge ahead? Somebody’s got to be able to do something with that statement…
I think the temptation to shoot her in the back of the head would be more than a man with taste could stand. Dunno about the US Army though.
Why does sex and sexy bring out more negative reactions than the violence of war? Oh, wait, wrong thread.
If Altas were a sex robot, I’d be way more tolerant of the complexity and cost. I’m sure the porn market could figure out a way to deal with the high initial price, just like they figured out how to make money online before anybody else.
Which is probably why “biorobots” (as the liquidators of the Chernobyl disaster were dubbed) proved to be far superior to purpose-built robots which ALL failed :P
the biorobots all failed too, they are dead
successful? ask their families
failed mechanical robots,and humans that died doesn’t mean the mission wasn’t successful. When it comes to robots the thinking has been they are less valuable than human life thus expendable. Bombs re more or less robots. The bomb dropped on Germany where destroyed in doing what any army couldn’t do without great losses. Many of those delivery those bombs didn’t make it back home, however their mission was ultimately successful. one could argue we are conditioned to accept human death and injury in war, but I have most to feel many of the families considered the sacrifice worth it
I wonder if eventually they’ll start trying hybrid legged/wheeled designs that let you select between flexibility and efficiency where needed. A hobbyist example:
http://hackaday.com/2013/05/04/quadruped-walks-of-four-legs-rolls-on-four-treads/
Not gonna lie, I just made a clip of this playing to Miley Cyrus’ Wrecking Ball. It was just too perfect.
Link to clip…?
lies
Well without Miley riding the wrecking ball in the clip it can’t be perfect, sorry.
Not *too* perfect, even though Atlas is also naked.
http://www.youtube.com/watch?v=sOKUCIMUZ3I
Yup, that’s the one!
Combine this with WildCat or BigDog and we can have the four robotic horsemen.
using the arms and torso portion would, in my opinion give BigDog or MeerKat a nice range of motion.
“The humanoid robot’s cost far outweighs the cost to modify a firetruck to be autonomous. Robot-per-purpose IS the way to go.”
Pocket calculators were way too expensive for general use in the 1970s but now we look back and laugh.
Pocket calculators have no moving parts. That is where the cost is. Electronic’s cost keeps coming down, software is really cheap, but mechanics, especially moving parts’ cost has not changed much.
Not true. Mechanical pocket watches are dirt cheap. Hard drives and DVD/CDROM drives require extreme mechanical precision and used to cost a small ransom… now they’re throw-aways even when they’re still functional.
Why? because you don’t have a single watchmaker turning gears on a treadle lathe. You stamp millions of them on a press for a fraction of a penny each. You don’t have individual humans in surgical garb loading hard drive platters onto a spindle… you have robots in a clean room do it by the thousands.
The more we use robots to build other robots, the more their price will drop, no matter how complicated the mechanism is.
Pocket watches and disc drives are very small, hence very little “material”. And it’s not the precision. It’s volume and stresses.
A human-capable robot has lots of high-power density actuators, low efficiency, and a big power source. Those will continue to keep costs far above a simple wheeled purpose-built robot for many decades.
Paul, I think you’re missing my point
As machinery goes, a dog, a horse, or a chimp are far, far more complex than Atlas or any other robot we can presently build. Yet, they are (what another writer termed) “cheap.” Why? Because biological machines are capable of reproduction. You don’t have to “build” them.
When the state of the art advances to the point where robots build robots— essentially implementing “reproduction,” prices will plummet, no matter how complex the machine.
I agree, and that does not conflict with my original assertion that making a high dexterity/high speed robot is not the right solution for the military’s needs right now.
Multi-purpose high dexterity robots building replicants of themselves, with no assistance from humans (I think that’s what you’re implying) is WAY off in the future, long past the time when the computers are smarter and faster than humans. I can’t wait to see what that will lead to, but I may be too old to live that long.
And that does not address the inherent low efficiency costs of many high power density actuators (see my post below). That may improve, but it won’t shoot up (or whatever the opposite of “plummet” is).
On that 20 lb. ball most humans would not been hit by it, the fact the robot was goes to show it’s needs further refinement. Then again we don’t know if if the bot seen and it’s circuits where already prepared for the impact. The videos are interesting to watch, but it will be mote interesting to see what hackers come up with after looking over that patents. With over 6,000s hit using a simple search using Boston and dynamics it going to be a chore. not to mention of possibly attracting attention of the NSA
The robot was stationary. The video is to show that the robot doesn’t fall over when hit. It is a very impressive demonstration, much harder to pull off than it looks like in the video. All kinds of tricky engineering needs to work together.
But I’m not sure where you’re going with the patent stuff. Why look up patents held by BD?
So hackers can take advantage of the knowledge to help build their own robots. Hopefully more the walking and balancing knowledge than the kill-power part.
That ball looks awfully large to be 20 lb. Maybe it’s hollow and/or polymeric. Is it actually 20 kg? Maybe it is 20 lb because Boston Dynamics is in the US and most US folks are more comfortable with measuring in pounds.
It’s a medecine ball, i.e., padded.
I recently seen a report where US soldiers becoming attached to current battle field robots are often reluctant to put the robot to work doing it’s job because the robot might be harmed. Robots that have no human like form factor, I wander what it’s going to be like with this a machine?
Actually that is utter bs. The guys do get attached but it has NOT interfere yet. The studies are being done incase it ever does. It is more aboutthe guys shedding a tear , and holding the broken robot like a baby when it breaks. All totally natural when you consider with out it it is them that gets blown up.
All I can imagine when watching this video is the Terminators walking over human skulls, even the sound at the start sounds like bones being crushed.
Whatever happened to the answer, “because we can?” Also, I’d like to point out that it’s not what the project specifically builds, but the technology and know-how that is spawned from it. I’m sure the applications are beyond just, “here, we built an android. now what?” We built this world for humans. Instead purposing a robot, why not make a humanoid robot for universal tasks?
I’m not against the project. It will -already has- taught lots of people lots of things about robotics, humans, engineering, teamwork, all kinds of subjects. I’m all for it.
I am just pointing out that it is far from a practical solution to the problem it is supposed to solve, i.e. be a soldier’s pack mule. And that it, and others like it, getting so much publicity leads people, even people participating in this discussion, to think it is the best solution, when in fact it is a very poor solution to that problem.
Does no-one see the benefit of a ‘bot like this being remotely piloted via an XBox Kinect? The autonomous features (balance, etc) would be simply necessary for error correction.
What every happened to ANDROIDS ? when will they appear :( (not the cell or a simple arm/leg) im talking Like 50% or more mech!
I am using one to browse the site right now.
LMAO, nice
At the time of writing this, it looks like someone at HaD overwrote a stylesheet or switched to the wrong WordPress theme. ;)
But, but, it DOESN’T HAVE A HEAD!
Did someone say HEADLESS ROBOT BODY!??
http://www.youtube.com/watch?v=s8d1mfLa5Vk
Yeah, I know how hard it is, but I’ll be much more impressed when it can walk without a harness and safety net.
The, um, harness and “safety net” is not for the robot…
I wonder if it can walk over a slackline :)
I saw a 6 axis industrial robot arm fitted with a large spatula. Its purpose? Replacing the humans who had originally used the spatula to flip pancakes on a conveyor belt.
All the bot did endlessly was repeat the motion of scooping up a line of cakes and flipping them over. Buying such a complex bot to do a simple task cost less than having a specially designed flipping device built and installed. None of that section of the production line had to be altered – and if the equipment was changed or rearranged, the flexibly made robot arm could be reprogrammed to adapt instead of having to have new single purpose equipment designed and built.
For a case like fighting a fire on a crashed airplane, an airport could have humanoid robots sitting at the ready in apparatus (as firefighters call their trucks) to have faster response times than humans. Then those robots could get out, grab the hose nozzles and get far closer to the fire than any human could.
A fire truck is very expensive. Modifying things like the seats, controls and parts like hose nozzles and other equipment for robot manipulators to work with should cost much less than an all new automated truck and the robot and adapted accessories could be transferred to other trucks.
Costing even less would be if the humanoid robots can be built to work with completely unmodified fire fighting equipment. A robot could be always at the ready then roll out to the fire, get out, grab a hose and be spraying the fire while the humans are getting ready. Then when they get to the fire a human could direct the robot for close in work.
A robot that can operate anywhere in an environment designed by and for humans requires nothing to be designed and built special for it. The less stuff ancillary to the robot that has to be special to accommodate it, the less the total cost of the robot.
Another place humanoid robots would fit in is in medical care. Imagine one used to deliver meds to patients. Given the ability to recognize and count pills, it’d never give the wrong meds or wrong amounts and it could go anywhere a human Dr, RN or other person can – without requiring any changes to the hospital facilities. It could also be programmed to monitor the wide variety of equipment which hospitals use in patient rooms by taking pictures of the displays and using character recognition to enter data into patient records, with the images attached for confirmation. An automated networked data recording system would be nice, but how many hospitals have such things?
A couple of humanoid robots could work with a hospital’s current equipment rather than spending a few million dollars upgrading everything.
Frederik Pohl’s “Midas Plague” may be only a couple of decades away. What are humans to do when robots can make everything and do all the service jobs?
” Given the ability to recognize and count pills, it’d never give the wrong meds or wrong amounts”
Unless the doctors prescribed wrong pills to a person who’s eg. allergic to certain antibiotics, and the robot won’t have the intelligence to hear the patient complain, or doubt the doctors’ orders.
Im sure a robot or the system in the hospital would still include a way for a patient to call for ‘live’ help. and the robot should probably have access to the same information concerning the patient as the doctors have so I would assume the doctors would be more annoyed at being corrected by a machine than miffed at the machine killing a patient at his/her order. You cant find fault with a mechanism (a hypothetical one at that) by presuming it would be used in a scenario beyond its scope of ability. Not that that dose not happen, but when it dose it is human fault not a shortcoming of the machines.
“Buying such a complex bot to do a simple task cost less than having a specially designed flipping device”
That’s bullshit, a flipping device is damn simple and would take an engineer an hour tops, then a mechanic could hammer it together in no time. What you describe is called bad management.
Let me try to explain more clearly why low dexterity/high speed robots are the more effective solution to automating most tasks that can reasonably be expected to be automated.
High dexterity requires lots of actuators.
Lot’s of high speed actuators in a small volume requires high power density.
High power density means higher stresses.
Higher stresses require special exotic materials (higher cost), both in the actuators and in the linkages they are attached to.
Higher stresses require more careful design and more testing time (time is money) in both the actuators and linkages.
High power density also means -for now- low efficiency.
Low efficiency requires a bigger power supply (higher cost).
High power requires bigger cables, bigger connectors, and bigger actuator driver/controllers (all higher cost)
Exotic materials, higher NRE (non-recurring-engineering), and everything associated with the lower efficiency add up to making a high dexterity/high speed multi-purpose robot cost far more than a fleet of low dexterity/high speed robots.
Yes, these costs will come down somewhat eventually, but not very much and not for a very long time, like decades. High speed/low dexterity, single purpose robots are the way to g for now.
The title should have read “Atlas Shrugs Off Wrecking Ball”
What is this feeling you humans call… spite?
No, it’s just that that title would have been more pithy.