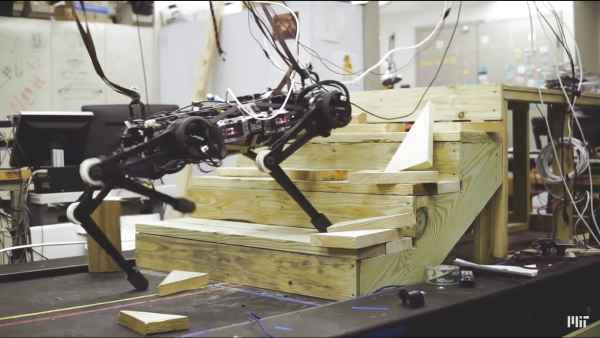
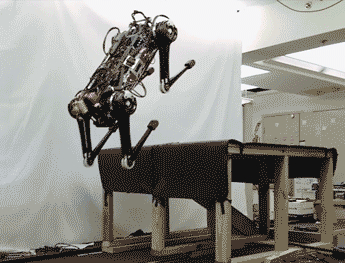
Foxes are cat software running on dog hardware, or so they say. And [Will Cogley] seems to have taken that to heart with this 3D-printed robotic fox, which borrows heavily from projects like Boston Dynamics Spot robodog. True, the analogy breaks down a bit when you include MIT’s Cheetah on the inspiration list, but you get the point.
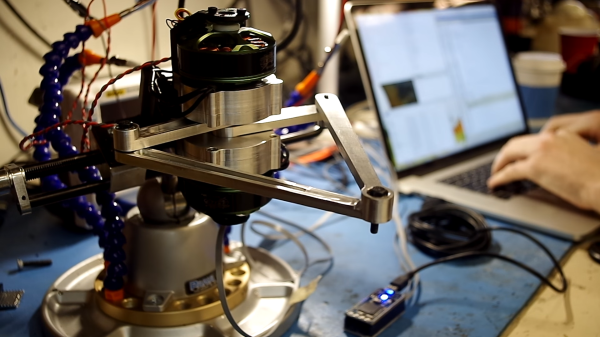
Very much a work in progress — [Will]’s RoboFox lacks both a head and a tail, which he aims to add at some point — there are some interesting design elements on display here. Whereas commercial quadruped robots tend to use expensive harmonic drives for the legs, [Will] chose simpler, cheaper hobby servos for his fox’s running gear. Each leg has three of them — one each for the upper and lower leg, and another that moves the whole leg in and out relative to the body. The dual-servo design for the leg is particularly interesting — one servo drives the upper leg directly, while the other servo drives the lower leg through a gear drive and a captive bearing arrangement connected to a parallelogram linkage. The result is a quite compact assembly that still has twelve degrees of freedom, and isn’t anywhere near as “floppy” as you might expect from something driven by hobby servos.
The video below shows off the design details as well as some of the fox’s construction, including some weirdly anatomically correct poses while it’s on its back. The fox is still getting its legs — you can see a few times when the servos get the jitters, and the umbilical is clearly a hindrance for such a lightweight robot. But [Will] has made a great start here, and we’re keen to see RoboFox progress. Although we’re not sure about giving the future head animatronic eyes.
Continue reading “Robotic Fox Is Part Dog, Part Cat — Just Like The Real Thing”