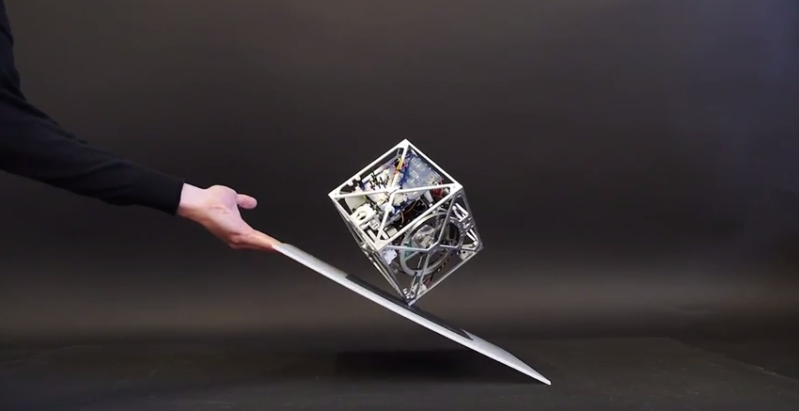
Meet Cubli! Cubli is a 15 x 15 x 15cm robotic cube that can roll around and balance on its corners using a series of gyroscopes.
The project has been going strong since February 2011 at the Institute for Dynamic Systems and Control in Zurich, where it is starting to get quite impressive. We first shared Cubli earlier this year, when it was just a wee 2-dimensional and corded 3-dimensional prototype.
Since then, it has become a fully enclosed wireless cube capable of jumping up on its end, balancing, and controlled falling — it can walk and roll! To do this, it has three large reaction wheels on each axis which can impart their angular velocity on the entire cube when the braked, allowing it to move in any direction.
According to the video after the break, the team is just building the cube “because they can”, however other researchers are interested in the technologies applications in self-assembling robots, and even planetary exploration.















We are borg. Resistance is futile.
i want one,
How about a red brick? I think that can be arranged.
http://www.engadget.com/2013/10/04/mit-builds-modular-robots-that-self-assemble/
Already covered on Hackaday though.
That is undeniably awesome. I’ll never look at my end tables in the same way again.
Planetary exploration – and this would be more suitable then….. pretty much every other form of locomotion how?
it can literally jump around (not shown here), the agility and degree of control is amazing. Despite the higher stresses the internal components are subjected to, no external rotary components are needed: The cube cannot land on its back. It is more difficult to make up situations where it could get “stuck”.
Nevermind. Maybe this is yet again just about having autonomous robots move around the battlefield.
I can’t find any references to actual jumping. The “jumping” described in their text and videos is meant as just raising itself from lying flat on one of its faces to a cornet/edge “standing” position.
Presumably it can jump like the MIT M-Blocks do:
http://www.youtube.com/watch?v=6aZbJS6LZbs#t=1m12s
This doesn’t require any joints or axles to be exposed to the potential dust or corrosive atmosphere. I don’t know if that’s the reason, just what I thought when she said that.
Think bigger, think not just one but dozens in a wireless mesh network, individual exploratory bots covering large areas quickly, with the ability to physically link together so if one gets stuck (like in a hole too deep to jump out of) then several can join together to make whatever shape they need to get unstuck.
It’s mainly intended for low gravity environments, where wheeled robots are not very efficient. See e.g. this talk from the SETI institute: http://www.youtube.com/watch?v=g_wNpnkbqpQ
it could have no external moving parts. sand/dust/dirt are brutal on rotational joints.
If you make this like 1x1x1 meter large and completely watertight, it should be able to move quite much anywhere and stand very bad conditions. Not sure how well the gyroscopes will scale though.
It’s not exactly the same as you ask, but the same team made a huge version of this back in 2007. (Definitely not the same concept, but still nice)
http://www.youtube.com/watch?v=gbT_XoSIlEo
Here you can find more infos about it: http://www.idsc.ethz.ch/Research_DAndrea/Cube/
Wow, they actually reinvented the wheel… by making it a cube. Just surreal.
ohh reaction wheels… been thinking of using them to create an aimbot for real guns
Already done, look it up on you tube.
It needs a Weighted Companion Cube covering.
I was thinking the same thing.
+1
LOL, that would have been awesome. Make it talk too.
Thats is crazy pants.
Yes, you can seal the cube to eliminate dust, but you can also seal a sphere and drive it from within, or a cylinder, or a cylinder with traction, or many shapes/ideas better than a cube. I assume we’re missing something as to why a cube for planet exploration….?
Because a cube can be stopped on an incline and stay put without consuming power.
so can a cylinder, tip itself up like the cube.
So can a car. Just shut it off, maybe apply the brake.
*face palm*
This might just be a better shape. Have it lay on it flat sides when resting, and have it roll on its rounded sides for faster locomotion (probably more efficient too) than building a momentum to pop-roll a cube shaped one.
I think the cube was done to be a beautiful/exciting/abnormal way to show the technology, and not specifically because the shape is the best for movement. Using this internally driven idea would work in pretty much any shape, whatever suits the specific use I guess. How about a rubber/silicone covering, so it could change it’s shape as it needed to and still remain sealed.
A cube is the simplest to design. Which makes it the most logical proof of concept.
Aren’t triangles/pyramids even easier? They can be used to create just about any object imaginable: https://www.youtube.com/watch?v=KdyvizaygyY (Computerphile)
^
You’re not taking into account having to move it around.
And does not blow away in the wind.
This can probably climb steeper inclines than a sphere. Especially if the sphere is takes its traction from gravity by moving its center off mass. But you could of course put gyroscopes like this inside a sphere.. maybe it would be more energy efficient.
very cool
I wonder how feasible it would be to have a sphere version of this.
Building momentum might be a problem though… But it would fly for miles if you made it “Jump” sideways/.
Finally, an interactive Companion cube!
This is exactly how satellites keep pointing there antennas back at earth.
Would it be possible to put the three gyros inside a motorized cardan mount and use this assembly as a stabilizing / driving core of a multipede robot? I imagine it could tilt, jump and roll like a monowheel :)
Sentry gun aiming servo.
I want that!!! It can be my new pet.
Oh reaction wheels! Kerbal Space Program anyone?