This could be the start of a new thing. [HarpDude] showed off his String Car Racers over on the Adafruit forum. It’s like a small model cable car on caffeine. String up enough of them and go head to head racing with others.
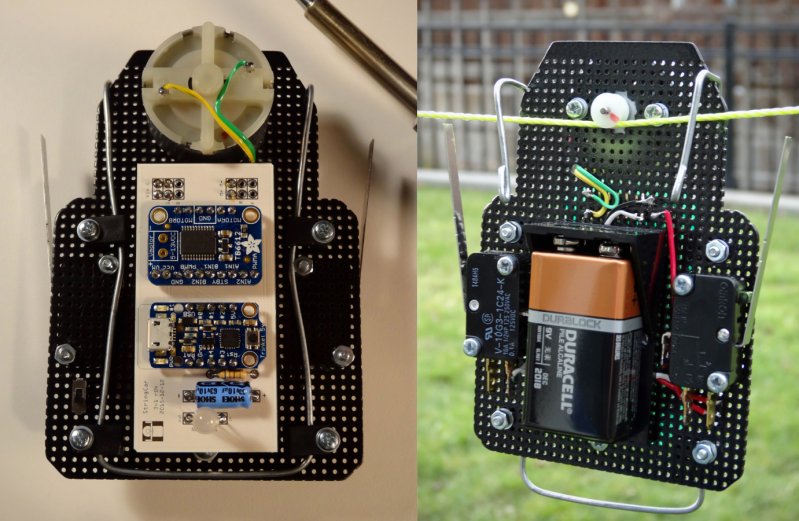
A motor with a small pulley runs over a length of string stretched between 2 posts. Below the pulley, acting as a counterweight balance, is the rest of the racer. A Trinket board, motor driver, 9V battery and a pair of long lever micro switches to detect end of travel. The switches also help reverse the motor. A piece of galvanized wire acts as a guide preventing the String Car from jumping off the string. And discovering the benefits of a micro-controller design, as against discrete TTL/CMOS, old timer [HarpDude] added two operational modes via software. “Pong”, where the String Car keeps going back and forth over the string until it stops of (battery) exhaustion. The other mode is “Boomerang” – a single return trip back and forth.
We are guessing the next upgrade would be to add some kind of radio on the car (ESP8266 perhaps) and build an app to control the String Car. That’s when gaming could become fun as it opens up possibilities. One way to improve performance would be to add two “idler” pulleys in line with the main drive pulley, and then snake the string through the three of them. Now you know what to do with all of those old motors you’ve scavenged from tape drives, CD drives and printers. Let the Games begin!
Thanks [Mike Stone] for tipping us off on this.















or string sumo to push each other out.
or string battle bots charging at each other head to head
Game ON! :)
yes please
AWESOME!
Use 2 strings as power supply or put a charger at the end of the string to infinite play.
With parallel strings you could have jousting bot battles.
Yeah, definitely needs an ESP8266 to offload all that heavy computing to a desktop pc :)
How about just a battery and a DPDT rocker with a long lever to detect ends and reverse the motor? You still need the motor though.
by using two parallel wires you could skip the battery and feed power from the wires
“racing robot” ??? Sure. and my e-cig is a not less than a FRICKING “glycerol steam engine”, Are my shoes are “smart skin” btw.
Still no article about a string phone.
Seriously, do you guys get paid for writing such … “articles” ? Really ?
omg go away
Sure, your god! (and strings pulled in your head)
Two outer idler pulleys could be lifted/pushed up/down by a servo to increase string path. Racing robot would then lift up and avoid detected obstacle(s) below.
Wow – bad day in the troll basement ‘bin’ ?? Did Mommy not make you lunch or what? They’re not a Fanuc, but they do race and they’re robots. Give it a break.
Great hacking opportunity.
This sort of thing isn’t new (Cub Scouts do something similar, I think), but adding microcontrollers to the mix probably is.
Moving obstacles near the string, so that the bot has to detect them and/or follow a particular course of position vs time. Like the old scrolling video games.
Local makerspace (TCMaker) had a contest back in 2010. Was a timed “Boomerang” race. Quite fun to watch and participate in!
http://www.tcmaker.org/blog/index.php?s=racer&Submit=Search
add an inertial wheel to swing left and right to avoid obstacles under the wire.
race is on
You could use proximity sensors to detect the ends and do a slow reverse. I was also thinking if you had feedback from the motor you could control the torque and manage the slip. This would yield much better battery life (minus the 1ghz CPU to run it :)
I made a simple arduino version of this bot, back in the 2011 for an Halloween party with my friends.
(italian page) http://www.tattik.altervista.org/fantasmone.html
I think that if you had some limit rules like overall size, wheel diameter, material, weight, etc. you could form a type of league!
…This is actually really cool!
setup(){pinMode(MOTOR, OUTPUT);}
loop(){digitalWrite(MOTOR, HIGH);}
exciting code!
Actually the possibilities are endless. Just need to think creatively outside the box. How about the robots need to drop a ‘bomb’ on/into target below.
Soft Start/End
Relay Race On Same String
Steep Climbing
Obstacle Avoidance
Direction Reversal
Jousting w/ Second Line Racing Robot
Firing Projectile at Target While Line Racing Robot is Moving
Target Capture
Battery Optimization
Payload Drop
Could be VERY exciting code!
This is like a cable cam https://www.youtube.com/watch?v=aGYZbXjID_A
add a revolution counter, simple camera, claw arm or hoist, and lift and stack things for Great Good! Tower of Hanoi contests. A container terminal for my model railroad! (oops, said too much)
About a month late, but regardless:
“Pong” and “Boomerang” can both be implemented by using a 555 in bi-stable mode to control an H-bridge.
Just sayin’.