How do you get eyeballs on a blog post? Put Raspberry Pi Zero in the headline. How do you get even more eyeballs? Put the word drone in there too. Lucky for us, there’s one very special project in the Hackaday Prize that combines both. It’s the Pi0drone from [Victor], and it’s exactly what it looks like: a flying Raspberry Pi Zero.
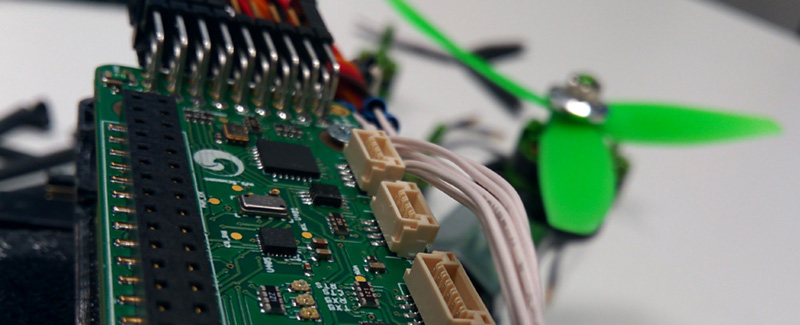
[Victor] has been working on the PXFmini, a ‘shield’ or ‘hat’ for the Raspberry Pi that integrates a barometer, IMU, and a few PWM outputs into a very small form factor that is just a shade larger than the Raspberry Pi Zero itself. It comes with standard connector ports for UART and I2C to attach GPS and on screen display for FPV flying.
Of course, there are dozens of flight controllers for drones and quads out there, but very few are running Linux, and even fewer platforms are as well supported as the Raspberry Pi. To leverage this, [Victor] is running Dronecode on the Pi for mission planning, real autopilot, and everything else that turns a remote controlled quadcopter into a proper drone. It works, and it’s flying, and you can check out the video proof below.



















I wonder if the pcb holding the electronics can be made to resist the forces of a quadrocopter.. being part of the body of the contraption to save realestate
That shield, PXFmini, is on the market for at least two months now.
It’s a step forward in terms of price from the PXF cape and Navio, the earlier and full-size Pi sized shileds already established and used in even industrial drones. They all support the same software stack, Ardupilot for flight control and optionally other stuff from the Dronecode foundation (ROS, DroneKit, etc.) and receive pretty good software support by Erle and Emlid. But a real hacker / maker might want to opt for just connecting the components together with a few cables and pin headers. The PXF and the Navio are mostly an IMU, some PWM/PPM interfacing chips and a GPS in case of the Navio. But they’re much more expensive than the sum of those components if you just connect them to the Pi. The PWM/PPM/Sbus decoding and encoding can actually be done by the Pi’s DMA subsystem and it’s already supported by the Ardupilot code anyway, you mainly need the IMU on your I2C or SPI bus and the GPS on the serial port.
This guy is wrong. the navio2 and erle brain2 are different from the pxf mini. PXF mini uses some PCA blah blah chip for pwm while navio2 and erlebrain2 use a stm32 to handle rc input and output. this allows them to use different pwm frequencies. this pxf mini forces you to use the same pwm frequency on all outputs. so that sucks and you can make your own. don’t forget about the bbbmini which is a diy cape for the beaglebone black to use with ardupilot. the pru’s are perfect for this and the beaglebone black is an excellent flight controller. I fly with navio2 typically and bbbmini. need to get a pi3 for my navio2 and use the pi2 as a wifibroadcast receiver for a fpv headset.
https://youtube.com/watch?v=LWwkB6hGD4M
^^^^The right video for the article, Brian.
very nice, and now the PI zero has the camera port even better. :)
How long before someone puts all this together and makes a personal quadcopter?
._ o o
\_`-)|_
,"" \
," ## | ಠ ಠ.
," ## ,-\__ `.
," / `–._;)
," ## /
," ## /