Getting back to basics is a great way to teach yourself about a technology. We see it all the time with computers built from NAND gates or even discrete transistors. It’s the same for radio – stripping it back to the 19th century can really let you own the technology. But if an old-school wireless setup still needs a 21st-century twist to light your fire, try this spark gap transmitter and coherer receiver with a Beagle Bone Morse decoder.
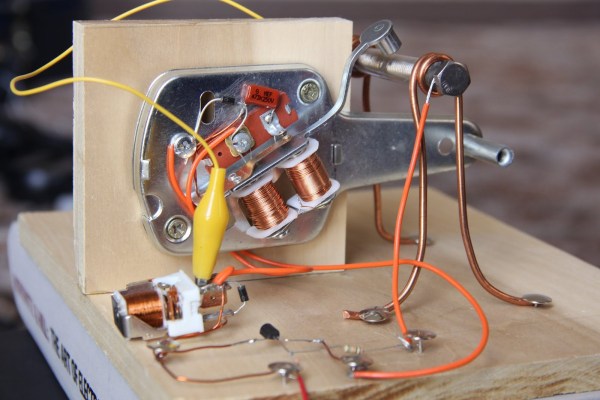
At its heart, a spark gap transmitter is just a broadband RF noise generator, and as such is pretty illegal to operate these days. [Ashish Derhgawen]’s version, which lacks an LC tuning circuit, would be especially obnoxious if it had an antenna. But even without one, the 100% electromechanical transmitter is good for a couple of feet – more than enough for experimentation without incurring the wrath of local hams.
The receiver is based on a coherer, a device that conducts electricity only when a passing radio wave disturbs it. [Ashish]’s coherer is a slug of iron filings between two bolts in a plastic tube. To reset the coherer, [Ashish] added a decoherer built from an electromagnetic doorbell ringer to tap the tube and jostle the filings back into the nonconductive state. He also added an optoisolator to condition the receiver’s output for an IO pin on the Beagle, and a Python script to decode the incoming Morse. You can see it in action in the video below.
If this build looks familiar, it’s because we’ve covered [Ashish]’s efforts before. But this project keeps evolving, and it’s nice to see where he’s taken it and what he’s learned – like that MOSFETs don’t like inductive kickback much.