[AltaPowderDog] is building a competition robot as part of his freshman engineering course at Ohio State University. The contest is sponsored by Nestle, so it’s no surprise the robots have to perform various tasks in a miniature candy factory. Broken up into teams of four, the students are building autonomous robots to move pallets, scoop candy, operate switches and pull pins from tubes. Each team is provided a standard microcontroller board and funds to purchase robot parts from an online store. The factory also sports an overhead infrared navigation system, which should help the robots stay on track.
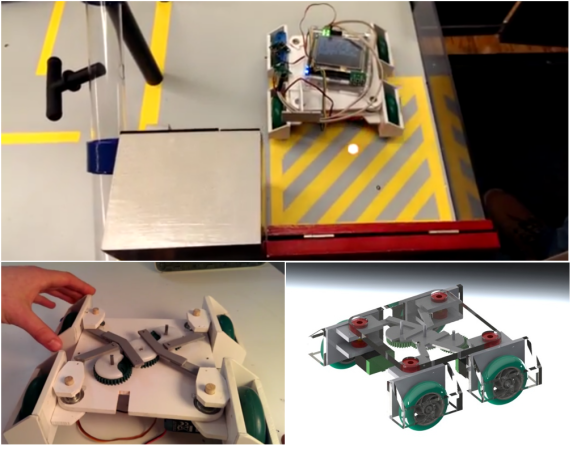
[AltaPowderDog] took his inspiration from [Michal’s] OmniBot, which used adjustable geometry wheels. A lever and gear system allows the robot to pivot all four wheels synchronously. This effectively allows the robot to turn within its own axis. With some proper path planning and end effector placement, [AltaPowderDog’s] team should be able to shave down their time through the candy factory. The team has run into a few issues though. This robot design only utilizes two powered wheels, which has caused the team to become stuck up on a ramp in the factory. To combat this, the team is installed a simple suspension which allows the non-powered wheels to move up and out of the way on the ramp. The results look promising. The video after the break includes a short clip of [AltaPowderDog’s] ‘bot making a quick turn and activating a switch. Very nice work!
Continue reading “Omnidirectional Robot Takes On A Candy Factory”










