Meet SAM, the Semi Automated Mason. SAM can lay bricks three times faster than a normal brick layer. SAM isn’t planning on taking away any jobs yet though — it still needs a human mason following behind to clean up the mortar.
The robot consists of a standard 6-axis industrial robot arm mounted to a track system with a conveyor belt style feeder of bricks. It picks up each brick, covers the side with mortar, and places it next to the last brick it laid. A mason still has to do the tricky parts, like corners and aesthetics — but SAM is getting better — it can very easily follow a pixelated map of an image and place bricks up to half an inch in or out from the wall, to create a embossed image.
I may be an odd egg in that I don’t like to use an IDE when developing uC firmware. Generally I rock the text editor and a makefile for 8-bit, adding OpenOCD and GDB when working with ARM. I probably shouldn’t be surprised that there is already OpenOCD support (and by extension GDB support) for the Arduino Zero. In fact, that’s how the Arduino IDE flashes the board. This should have been obvious since the board is really just a breakout for the SAM D21 chip which is already supported.
Riffing on the thought of this being a breakout board, we think they did a pretty good job. There are two USB connectors; one let you access the board as a device or a host while the other connects the debugging hardware. If you’ve never used an On Chip Debugger before it’ll change your life so do give it a try. When you do move past the initial prototyping phase of your project you can still use the Zero as a debugging tool. There’s an unpopulated 10-pin header (not sure if the small pitch header comes with it or not) which can be used to interface with a target board. [Bob] also spent some time talking about the configurable 6-pin header which allows you to choose from a range of hardware protocols (SPI, TWI, etc.).
Unfortunately we still don’t have info on the availability timeframe or pricing information. There was one hiccup with this pre-production run (two signals were swapped on the PCB) and they need to spin another board, populate, and QA before they can green-light the final product.
Editorial Note: Atmel advertises on Hackaday but this video and post are not a product of that relationship. Hackaday doesn’t post paid content.
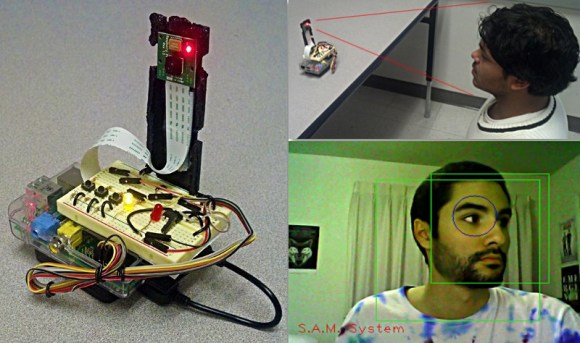
The team designed SAM using OpenCV to track your face in order to recognize when you aren’t watching the road. It alerts you through a variety of audible beeps and LED lights, and is programmed to only alert you after set time values — i.e. it’s not going to go off when you’re checking your blind spot, unless you’ve been checking it for over a certain length of time. It also has a silence button you can press for situations like looking around while you are parked.
The proof of concept device was built using a Raspberry Pi, the PiCam, and a breadboard to accommodate some manual controls, the buzzer, and LEDs. It also continuously records video of you on a 30 second loop, and in the event of an accident, it saves all the video — perhaps proving it was your fault. Can you imagine if all cars had this installed? On the plus side you wouldn’t have to argue with insurance companies — but if it really was your fault, well then you’re straight out of luck.