The selfie: pop culture’s most frivolous form of self-expression is also probably one of the most human acts you could find yourself doing in a day. Everyone is guilty of snapping a quick pic from time to time with the expectation that it will leave an impression on those who see it. All of the implications surrounding why we do this support our deep-seated need to sculpt an identity for ourselves using others as the hammer and chisel. So, consider how upside-down the world would feel if you caught a robot posing for a shot in the mirror? What about one whose sole function was to take selfies and post them? If this breaks your mind a little, that was the intention. This #selfie robot by artists [Radamés Ajna] and [Thiago Hersan] is the first development in a larger body of work called “memememe”, which is meant to comment on our culture’s obsession with the trending, selfing nature of social media. This specific project explores the relationship between conversation and identity in a situation where there is no second party.
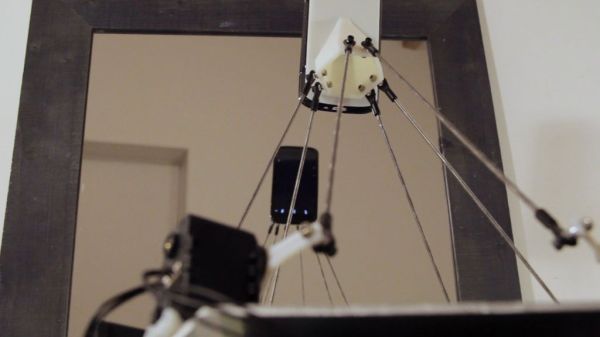
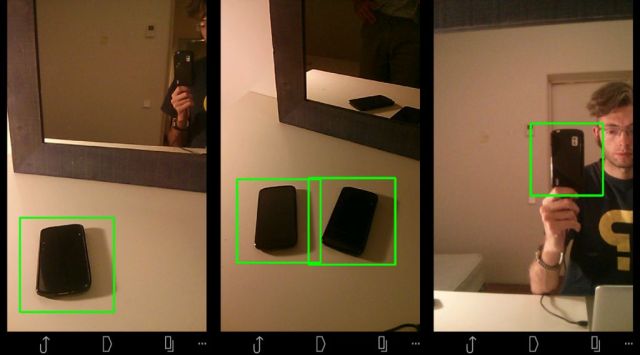 Hardware-wise, the #selfie bot is a Stewart platform made from six servo motors and a few pieces of carefully measured pushrod connected with swivel-ball-links. An android phone is mounted on the end effector which acts functionally as the robot’s face and eyes. To make it self-aware in a sense, [Ajna] and [Hersan] created their own recognition software with Open CV using a collection of sample images of various phones as reference points. As soon as the robot recognizes itself in the mirror as indicated by specific words flashing on its screen, it takes a picture, immediately uploading it to its own tumblr account. [Ajna] and [Hersan] have a nice description of their process on the project’s Instructable’s page which you can check out to see how they used Haar Cascades to create their custom object recognition. Additionally, if you’d fancy building your own robot to covertly place in your living room to snap pictures of other phones, you could check out their code on github.
Hardware-wise, the #selfie bot is a Stewart platform made from six servo motors and a few pieces of carefully measured pushrod connected with swivel-ball-links. An android phone is mounted on the end effector which acts functionally as the robot’s face and eyes. To make it self-aware in a sense, [Ajna] and [Hersan] created their own recognition software with Open CV using a collection of sample images of various phones as reference points. As soon as the robot recognizes itself in the mirror as indicated by specific words flashing on its screen, it takes a picture, immediately uploading it to its own tumblr account. [Ajna] and [Hersan] have a nice description of their process on the project’s Instructable’s page which you can check out to see how they used Haar Cascades to create their custom object recognition. Additionally, if you’d fancy building your own robot to covertly place in your living room to snap pictures of other phones, you could check out their code on github.
Watch it selfie :
Continue reading “Nothing’s As Vain As A Phone Taking A Selfie Of Itself… With Itself”











