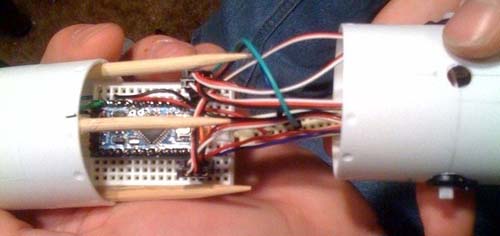
Hackers [Navic] and [K.o.D] have fitted an Arduino Pro Mini and an array of components into an off the shelf rocketry kit to create a guided model rocket, taking the whole idea of Arduino-based space technology to another level
The Arduino reads signals from internally mounted accelerometers, and adjusts balsa fins (via 4 micro servos) to correct the rocket’s flight path. Due to the nature of model rocketry, the active guidance is limited to the 3 seconds that the rocket is traveling upwards. A valiant effort nevertheless. Videos of the rocket’s maiden voyage, and a system check after the break.
[youtube=http://www.youtube.com/watch?v=sKiLbdQ7d1c]
[youtube=http://www.youtube.com/watch?v=swjb5wQ1JXU]














p.s. I surprise how many mention legal bs, it sad to see so brainwashed generation, looks like if government forbid to breath you all will quietly line up on bridge and drown yourself
Its not like he shooting people or aiming it on aircrafts, if laws wast broken you all would be slaves right now
@eldon: They’re developing one, a low cost, very smart weapon
It’s called Spike, a man-portable rocket that is low cost. It’s meant to be a counter to the battlefield that the US looks to be engaged on in the near future. Namely, this means that it is a counter to the bad guys throwing a heavy machine gun in the back of a beater pickup truck. That sort of threat would require the use of a very expensive missile now, or a very cheap Spike missile in the future (hopefully)
Unfortunately, it’s lacking in the ever-critical political dimension. It may be cut due to lack of high-level interest.
More info on Spike can be found here:
http://www.designation-systems.net/dusrm/app4/spike.html
lol i like the sound it makes
In the 2nd vid I was really getting into the rhythm they we putting out. I noticed my foot started tapping, then I turned up the sound and was starting to head-nod. jammin, man– just jammin.
I hate to be that guy, but as an idiot who thought a NO2 powered [snip] replica with a flight plan driven by boost high/coast at apogee (with a 38 mph stall while you read the GPS )in 1986 was a great idea until I got caught…. well, it was fun at the time.
The rules against powered devices with active guidance systems have been clear for a long time. But that was 15 years before 9/11. I’m not so sure folks get off on technicalities these days.
@Steve Actually a form of fixing the overcorrections is known as PID (Proportional Integral Derivative) control
Basically you need some feedback. There are three different numbers:
The proportional, which is based off of the current feedback
The integral, which is based on the sums of the previous feedbacks
The derivative, which predicts future outcomes based on the slope of the curve.
The three numbers are then factored into an equation to determine what corrections need to be made.
In case you are still curious,
http://en.wikipedia.org/wiki/PID_controller
Or one with a few more purty pictures
http://www.learncontrol.com/tutorial/index.html
You cannot g vector stabalise a rocket, which accelerates at +2-3g, with only accelerometers. you need gyros.
also needs bigger shoot
Does it be said; by mentioning the illegality of any action doesn’t have to mean those bring it up, aren’t necessarily sheeple, just giving a fair caution?
Could it be the rocket may be “top heavy” is the reason for th flight path not the “guidance” control surfaces.I agree with andrew this is not a guided anything.
I’m surprised Al Kida hasn’t yet use self guided model aircraft to turn up we have be be very afraid level, now they know a suicide bomber doesn’t even need to kill himself, to get an out of proportion response.
The $5K Spike launched against a heavy machine gun? That sales pitch must have com from the industrial military complex. The same folks trying to get local/regional emergency management to spend local tax dollars and DHS/FEMA grants to but armored vehicle, and UAV.
@Dave Eaton
It doesn’t contradict the previous sentence if you understood the context, sorry I may not have made that clear. My comments about a complete waste of (my) time were in reference to bothering to watch the second video. Why on earth would I want to watch servos twitching for 1:17, seriously is that their idea of testing?
I thought if I commented it might save people the trouble of watching it themselves.
@everybody else (with a few exceptions),
stop moaning about legality and say something useful about aerodynamics, servo response times, g forces etc.
This is hack a day not don’t break the law a day
@D_:
Yes the rocket is “top heavy”, that was the point! Messing with the cg and cp with weight and design mods gave us this condition that was good – let me explain.
All the mods are done and installed. Electronics are not turned on, but the cg and cp have shifted in the rocket. If we used the same motor to launch this rocket, it would “nose over” and hit the ground before the 3 second burn was complete.
We wanted this “unstable” configuration to occur naturally due to cg and cp locations in the rocket itself for one reason: With the electronics turned on and motor ignited, does the rocket “nose over” and hit the ground before the 3 second burn is complete?? If that happened then it is because the electronics had no effect on the flight path of the rocket.
This did not happen, as you can see in the video. The electronics turned on, moving the front fins changed the forces around the cp which allowed the rocket to fly horizontally straight during the 3 second burn.
This proved the system worked to control the rocket’s flight path, because naturally with nothing but Newton controlling the rocket, it would have crashed < 3 seconds, nose down. Since Arduino was controlling the rocket, it flew straight for 3 seconds and then plummeted to the ground after the motor ran out.
@Everyone:
I didn't mean to confuse everyone by saying 'guided' instead of 'controlled', and I didn't want everyone to get the impression that the transition from vertical to horizontal was due to the pre-programmed control system. The control system took over at horizontal flight for the couple seconds left in the motor to keep the rocket horizontal.
@leafy:
Sorry about the second video, the fins were taped on at that time, not completely centered and glued. That video was to show friends and family that don't know anything about 'guided' or 'controlled' rockets are, or what electronics are for that matter. It was an illustration of how the two opposite fins move together against the direction of the rocket to stabilize it. If you noticed, the fins don't 'run into' each other when both axis' motion is being corrected either. Sorry it was a waste of your time.
I for a gyro just pick up a wii motion plus. It uses I2C and is has been interfaced to the Arduino
Keep in mind, fins are guidance system as well. They help to generally guide and maintain the direction of the rocket. They are not “Active”. I would imagine if there were any payload besides a recovery vehicle (parachute, streamer, gyroblade, etc) matters would change enormously.
As long as the rocket is not guided toward or aimed at a target and this is done on your own land, it should be ok legally. I fly high power rockets. It’s intended use or how it’s is used that would be illegal. But that’s not to say you won’t be investigated/harassed by the some government agency.
There is a sunseeker guided rocket that’s been out for a while and no issues with legality. Cool project at that level. Try it with a G motor for higher flights and more payload electronics.
@Navic You keep on doing stuff with Arduino. This site is full of people who think if you don’t use straight transistors to make computers then you are not doing it “hardcore.” A wrench is a tool too. Yet you would be shocked at how many times people use them for hammering things.
@Arduino haters. Got a little clue for you, not everyone went to a EE school. You should be happy for a tool that will allow those who have not been to EEing schools to do electronics. If you had to go to a school to figure out how to do things, then you EE people would get your hands slapped every time you used a computer to program. You did not go to a computer programmer school. A tool is a tool is a tool.
@Paul I wouldn’t go up to a G with that. For one using accelerometer will not work as the flight shows.
What they really need is a gyro.
Now an interesting project would be to roll stabilize a model rocket.
You would only need one servo. It could really help with video camera shots.
@Squirrel thanks for the PID links. I have been wanting to play with augmented stability for a while now and that is just what I needed.
Ignoring the legality-naysayers, this is a great project. Everyone has to start somewhere, and these guys are on their way.
@lwatcdr
Good luck with the stabilisation project – it’s a very worthwhile and rewarding thing to try and do.
Just as a pointer, I noticed that you used the term ‘augmented stability’. That’s not really a term that exists in the control engineering field, so you might not have much luck if you google for it. PID loops are basically really noddy classical control, there’s absolutely tonnes of literature on the subject. ‘Modern Control Systems’ is an excellent beginner text book if you want a thorough grounding.
As a hopefully useful contribution, you’ll be aware that a fin will produce an effect that is proportional to the velocity of the fluid flow over the wing (all else being equal) so you’ll want to account for air-speed, perhaps with a pitot sensor. You then can just divide your proportional gain (Kp) by the dynamic pressure (so Kp/(0.5*density*velocity^2). The pitot sensor measures 0.5*density*velocity^2 directly so you don’t need to worry about the individual terms.
Best of luck!
@ed thanks. When I have time I plan on doing it step by step. The first step would be with a two channel glider. I am planing on building it with a reduced dihedral wing and then us and accelerometer and ailerons to provide roll stability. If I can get that axis working then I will use differential pressure in pilot tubes and use that measure slip and angle of attack and then start reducing the stability in those axis one at a time until I get that nailed.
I am thinking of using something like a CG Gentile Lady as my test plane because of it’s low speed.
I might include a channel to pop off the wing and deploy a chute for when things go really bad.
Eventually if I ever get it all working I would go for a flying wing with no vertical surfaces.
@Graycode
“If you had to go to a school to figure out how to do things, then you EE people would get your hands slapped every time you used a computer to program. You did not go to a computer programmer school.”
Yes we did go to “computer programmer school”, it required for EE to take some CS classes… And because so many people did not take CS classes Apple try to turn computer into TV and big companies try to turn Internet into pay-per-view channels on TV
have you ever tried using a gps guidence system with a targeted position (46.083253 n, 62.334523 w)
my idea was to use a balloon to get my device to “the edge of space” then a modified solar powered Lifter drive (ion propulsion) to get it the rest of the way.
contrary to popular belief Lifters do work somewhat in low pressure air but they do not work in a vacuum at all.
Very impressive. Accelerometers only? No gyros anywhere?
No gyros at all! Arduino calculates servo positions from the accelerometer only
Since so many people seem to be so hyped up on rockoons has anyone thought of launching a rocket from a model plane with a propeller? This would probably fall under some sort of weapon classification, but having the rocket launch from the plane would give you much more steered flight than you would have from the rocket with servos.
that breadboard and wire mass must weigh a lot, maybe streamline the design more.
too bad you can’t set those thrusters to burst mode.
lots of good stuff here. inspired me it has!
I don’t know what the laws are concerning guidance systems on amateur rockets, but it seems they should be required.
Your odds of a safe and successful flight go way up if your vehicle has some means of sensing and dealing with flight anomalies as they occur.
Winds change, air temperatures and densities change, your motor performance may vary from how it ran on the test stand. Dealing with these things correctly and in a timely fashion are key in allowing your to fly your rocket again and again.
sparkfun has a 6-axis IMU for $450:
http://www.sparkfun.com/commerce/product_info.php?products_id=8454
From their site: “The v4 provides 3 axes of acceleration data, 3 axes of gyroscopic data, and 3 axes of magnetic data.”
Looks small enough to easily fit in a model rocket, and could be just the thing we need to stay safe and on course through a flight.
Full disclosure: I am in no way related to sparkfun.com and receive no compensation of any kind for pointing out their stuff.
I agree with Simon, you should have smoothed the readings from the accelerometer, and also adjust the sensibility of the accelerometer to match de acceleration of the rocket, and rethink the position of the fins on the servos, and since I’m already here, you should design a system to use just two servos to control the fins (make the servo rotate an axle, and place the axles almos on the same level), and attach the upper part of the fin to the axle, this way the wind won’t exerce too much force on the axle.
Yeah to all you guys that are leaving comments saying this is illegal… One dont you think the FAA has better things to do? and two this really isnt a guidence system so much as advanced stabalizer system. SO shut up and give these guys some congradulations on something that is pretty damn cool.
what program did u use to build it simulated
what program did you use to build and launch the simulated rocket
We didn’t simulate, just pencil and paper math
This is more of a fly by wire system, not a missal control system. in amateur rockets “Fly by wire” is allowed.
The NAR code pretty much says you can’t do this, but this is really more of a low-power amateur rocket, so if you have some decent (i.e. relatively remote) place to try it out, you shouldn’t be bothered. Just don’t try showing it off at a NAR launch. The Bush administration DID rule that APCP was not an explosive, so you can’t totally bash them. The BATF guys are just doing their job, they have to be concerned with the nuts that might think that this is a good way to blow something up… yes, there are people that think that way. Those of us that enjoy the freedom to play with advanced technologies need to be responsible in how we do things like this, or somebody else is likely to take it away from us.
Just so you guys know, the NAR has no legal authority, they are a private organisation, however they are quite influential.
Beautiful project. I’m having issues interfacng your code with a MMA7361 3 axis accelerometer. I’m thinking I will need to include the accelero library.Navic, do you have any suggestions?
To all of those who posted inaccurate legal nonsense. Get a life! A perfectly legal Barrett .50 is a far better weapon than any guided model rocket for doing naughty things. You want somthing to really worry about look into basement biotech and DIY PCR.
Back to the fun, what about launching augmented projectiles from combustion lauchers, a.k.a spud guns? I’ve used foam pool noodles as a discarding sabot which allows fins. I’m thinking scale this up a bit and you have a cheap test platform. Another idea is to make a foam javelin with foam fins, again as a test platform mabe for a cool long distance lawn dart gsme. Anyway, thank you for the inspiration Navic
“Arduino-based space technology”
This thing won’t work in space. Its engine is too weak for it to fly fast enough for the fins to have a measurable effect in the extremely rarified atmosphere.
To be “space technology” you’d need something like gimballed engines or side-facing thrusters. You might think that the same code you use for the fins could be used to steer a gimballed engine or fire a thruster. However, your code keeps the fins slanted all the way until the desired position is reached. If you did that with gimballed engines or thrusters, your rocket would rotate past the desired position. Your code would promptly begin correcting, but the delay between reading the orientation and responding means it would be in a positive feedback loop. Eventually (how long depends on motor power and gimballing aggressiveness), the oscillations would grow so large that the rocket would turn around 180, at which point your code would keep turning the rocket in an ever-faster pinwheel. If you used the same turning ratios for a gimballed engine that you used for the fins, I estimate pinwheeling would begin between 2 or 2.5 seconds after ignition.
The point is that this isn’t space technology. Your code is too primitive to even be adapted for the approaches that space technology requires. You need to start over. Instead of measuring merely the difference from the desired orientation, measure both that and the rate at which the orientation is changing. The trick is to make both go to zero at the same time. Then you’ll have some space tech on your hands. Until then, your project is really just a careening missile that pinwheels as soon as the atmosphere drops below 10psi. Depending on an atmosphere for your rocket to work is most definitely not “space technology.”
Guys have been flying pulse jet aircraft since the 60s… if guidance cell plus propulsion equals illegal missile lots of us would be locked up. As a matter of fact … a company just started selling pulse jet motors again… I want one looks like terrible fun….. I had never thought of a pj rocket but now I’m curious. Runs on gas… no throttle no cutoff.. I wonder how far straight up it would go hmmmmm
How refreshing to look back all these years and see:
1) How useless and retarded this “hack” was
2) Comments about how HAD mod-idiots were in love with Obama (are you still in love with that moron, guys?
3) How obscure this site really is. You know, you could become something if you would just stop publishing garbage like this, get some good writers, and start publishing interesting and relevant articles instead of just re-posting projects that random idiots have copied from the last thousand people who did the exact same thing.
So, With a Balloon drop you could send this to target albeit rather fast.
So, with a Balloon drop you could direct it to target albeit rather fast; might only need 1 stage at the final leg.
Here are some links below to start looking up legitimate info. on laws applying to amateur rockets, as many people comment on what they THINK the law might be.
The materials used, power of the engines, weight, and altitude all determine if a model rocket starts to require FAA approval to fly.
This project is more of an attempt at a stabilized rocket in any case. I think it is not wise to call any amateur rocket projects “diy missiles” – as that is a good way to bring negative attention to the hobby.
http://www.nar.org/NARmodeltypes.html
http://www.nar.org/pdf/FARrockets.pdf
from the FAA rules:
(a) Class 1—Model Rocket means an amateur rocket that:
(1) Uses no more than 125 grams (4.4 ounces) of propellant;
(2) Uses a slow-burning propellant;
(3) Is made of paper, wood, or breakable plastic;
(4) Contains no substantial metal parts; and
(5) Weighs no more than 1,500 grams (53 ounces), including the propellant.
(b) Class 2—High-Power Rocket means an amateur rocket other than a model rocket
that is propelled by a motor or motors having a combined total impulse of 40,960
Newton-seconds (9,208 pound-seconds) or less.
(c) Class 3—Advanced High-Power Rocket means an amateur rocket other than a
model rocket or high-power rocket.
toy
Why should control be limited to two seconds? Aerodynamic forces still act on it even after the rocket motor shuts off. Most in use by the military have their engine cut out about a 1/3rd into their flight range.
A medium range that has a stated range of 190km may only have powered flight for 10km and the rest of that flight is just the time it takes to fall to the ground starting at mach 4 and 20km altitude.
But the guidance is active during the freefall phase as well.
Also there are unpowered glide bombs which are guided.
Yes I know most medium range have weak sustainers keeping velocity loss to a minimum, just using it to make a point.
Actually, this isn’t even “guided,” which means having a system that guides the rocket to a particular point in “space” (as in 3-dimensions, not “outer-space”) which I think is illegal. This would be considered “active stabilization,” that is, controlling its attitude to keep it going in a specific direction, like “up” or anti-roll, etc.
It is not unlawful to fly a guided rocket. It’s a drone by any other measure. The only distinction is the shape of the vehicle and propulsion. Check our arduino you can solve for the spinning problem with a digital gyro