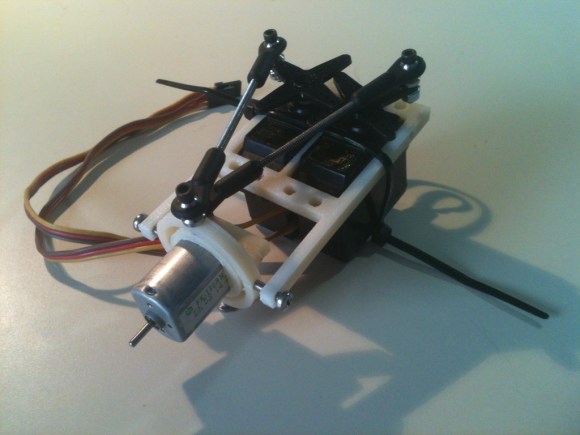
Here’s a 3D printed Hemispherical Omnidirectional Gimballed Drive system which you can make at home. That’s a mouthful which is why it is commonly referred to as a HOG drive. Never heard of one? Well you need to keep up with your Hackaday because about 20 months ago we featured this amazing robot project that uses one. The design is a tricycle orientation with the HOG drive as the only powered ‘wheel’. But it’s not really a wheel, it’s a half-sphere (a hemisphere which is not pictured above but attaches to the motor spindle) which can provide thrust in any direction depending on which way the motor is spinning a how the gimbal bracket is oriented.
Unfortunately [Dan] isn’t showing off a vehicle that is powered by the device just yet. But from what we’ve seen in the demo after the jump it is fully functional. His target project for the system is a line-following robot which we hope to post as a follow-up when he reaches that goal.













Ah, looks better in the vid, the pic made it look like it was gonna bind up, the actuator arms interfering.
Seems like it could do with a lower speed, higher torque motor to me though.
I always enjoy Dan’s work and definitely look forward to what he’s got up his sleeve!
Thank you! That really lifts my spirits.
Nice hack! When you replace the motor with a mirror this could be used for cheap laser positioning.
It could, but also there are automotive mirror adjustment assemblies available in surplus outlets, which may work for that also…. but don’t have servo feedback, which may or may not be important depending on app.
This is similar to the Curtis Boirum design back in 2011(http://hackaday.com/2011/07/09/amazing-hemispherical-omnidirectional-gimbaled-wheel-robot/). Except his was CNC machined I believe. Still, these Omni drives seem very competitive.
I credit him as much as possible, his post on Hackaday was what inspired me. Thanks, Curtis! I figure if I can make just a few good parts that will help other people build their robots faster.
It amazes me that everyone links to Curt’s work, but no one ever mentions Gene Burbeck’s antweight robot One Fierce Low Ryda that used a HOG wheel back in 2008. Gene used the motor drive for the horizontal spinning bar to drive the HOG wheel, since then he’s done a 12-lb that works pretty well too.
http://www.youtube.com/watch?v=dxXk0PDvw7g&feature=youtu.be&a
Now for Orange County Cycles to build one of these HOG’s to ride on! B^)
I love it! Who do you know at the Discovery Channel?
One control arm is driven on axis but the other is slightly off. How much coupling is there between the axes? The design in the video looks slightly different and looks like it would have less coupling. I guess you could always compensate that away when driving the servos.
I wonder what this would be like as a no-tech Segway trike, just a motor on the end of a stick. Be a heck of a ride for the first test pilot.
I think Ill build 3, attach some ccpm ducted fans, ???, profit err I mean UAV
yea thats called a helicopter…
Helicopters change the pitch of the rotors and not typically the entire rotation angle
This setup can be used for vectored thrust on rc planes too… =P
brushless jetfighters, right? :D
I would think you’d want to center the point of rotation as close to the contact point as possible. Gimbaling the drive should not translate the robot. That would require extra work from the positioning servos, slowing down the responsiveness of this system, at best. The intention of the gimbal drive is to operate near the singularity point so that direction can be changed nearly instantaneously, with minimal work. That is my perspective.
Are you building a walking robot or a rolling one?
Anyone notice that on smooth ground this essentially is an infinitely variable transmission as well, up to a point. (pun)
This would be a good nozzle director for a larger-scaled model rocket. You could reproduce models without fins just like the real rockets. Something tells me that’s probably illegal for some dumb-ass reason though.
Found an interesting version, possibly the original. HOG wheel motorcyclish thing from 1930’s france.
http://blog.modernmechanix.com/spherical-drive-wheel-propels-odd-vehicle/