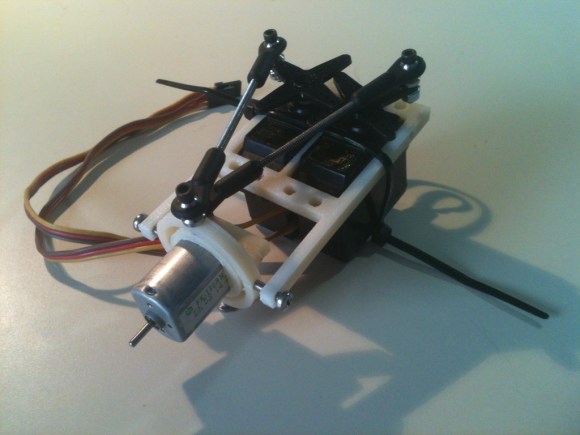
Here’s a 3D printed Hemispherical Omnidirectional Gimballed Drive system which you can make at home. That’s a mouthful which is why it is commonly referred to as a HOG drive. Never heard of one? Well you need to keep up with your Hackaday because about 20 months ago we featured this amazing robot project that uses one. The design is a tricycle orientation with the HOG drive as the only powered ‘wheel’. But it’s not really a wheel, it’s a half-sphere (a hemisphere which is not pictured above but attaches to the motor spindle) which can provide thrust in any direction depending on which way the motor is spinning a how the gimbal bracket is oriented.
Unfortunately [Dan] isn’t showing off a vehicle that is powered by the device just yet. But from what we’ve seen in the demo after the jump it is fully functional. His target project for the system is a line-following robot which we hope to post as a follow-up when he reaches that goal.











