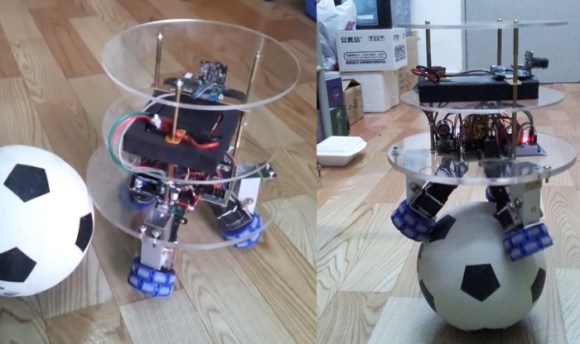
If you want a different kind of feedback systems challenge, ditch the Segway-style robots and build one that can balance on a ball. UFactory is a startup in Shenzhen, and this impressive little guy is a way of showing their skills applied to the classic inverted pendulum. At nearly 18 inches tall and weighing just over six pounds, the robot boasts a number of features beyond an accelerometer and gyroscope: it has both a WiFi module and a camera, and can be controlled via a homemade remote control or a Kinect.
The build uses plastic omni-directional wheels attached to 3 brushed dc motors, which attach to the base of the robot with custom-made aluminum brackets. The UFactory gang constructed the robot’s body out of three acrylic discs, which hold the electronics directly above the wheels. The brain seems to be an STM32 microcontroller that connects up to the motors and to the sensors.
You won’t find the code on their Instructable yet, but according to the comments they have plans to make the entire project open source. If you’re desperate for more details, the UFactory team seems willing to provide source code and other information via email. Make sure you see the video after the break, particularly the end where they demonstrate interference and carrying loads. This isn’t the first ball pendulum we’ve seen; take a trip down memory lane with the BallP ball balancing robot from 2010.














FINALLY! I drool every time I see a self balancing robot on a ball, but intil this day it was only a thing universities did. I’m so glad that its now available in a tutorial version. Well… I better start buying the items!
Nice. But students of ETH Zurich, Switzerland, built one of those years ago. But It’s very impressive…
This is true. But as I posted above: This is now available for hobbyists like me and not behind walls of some university. I need this thing in my apartment, not in the hands of some students. This was always a problem until today.
Reading the comments over at Instructables, it looks like they try to Kickstart this Robot. I never read about a university doing this. For me its a win!
I don’t see any software in that instructable or any details on those electronics.
You’re right that there’s no code, but when I commented they did offer to email it to me.
it’s good to see a more accessible ball balancer. I was hoping it would be mine though – started over s year ago but stalled due to lack of time and parenthood.
I make an ballbot too, but I don’t know how to control it balance in ball, Could you please share your code about ballbot?
Good job, just needs some fine tuning of the pid and couple changes to the control scheme to make it a bit less jittery.
It looks like the controls are fighting the pid instead of changing the setpoint
Agreed, the control scheme used is kinda useless.
A wii nunchuck remote particularly comes to mind as it has a joystick for all 2D movement and 2 buttons for rotational axis.
That won’t work with a REAL football.
Most important question needs to be answered: can it carry a cocktail drink?
Can you send me the source code, please?
Could you please send me all source code for reference?
Will you please send me source code?
How did you convert the X and Y torques to the 1,2 and 3 motors?
I’m trying to use NEMA16 step engines but I’m not getting it with two PID’s.
Here is a Link to their github repo : https://github.com/uArm-Developer/UArm-Self-balancing-ball
Anyone can help with how the control law with derived ? Especially in XY_speed_calculate() : Shoudn’t we use the error from the setpoint for the control instead of the actual value. In case of the position : K_position * position is used. Where position is updated with poistion += position_Needed (position_Needed is from the Wireless Controller). So we are not using the error from the setpoint, rather the setpoint itsself ?