Looking for a fun and easy to do project to begin your foray into the fun-filled world of Arduinos? How about your very own drawing robot, aptly named, the Plotterbot!
We first heard word of this project when [Jay] submitted a giant plotted version of the Hack A Day logo for our Trinket contest, and we liked the Plotterbot so much we had to give it a featured article!
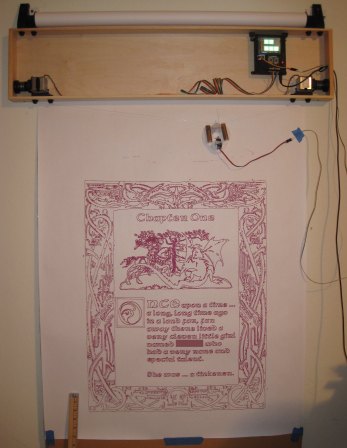
It’s a very simple design that uses an Arduino, 2 stepper motors, a servo motor (for pen lifting), some fishing line and various odds and ends you can probably find around the house. Realistically it will cost around $100 to build, but if you can salvage some parts from an old printer or scanner, even less!
[Jay] is currently releasing a series of detailed posts on his blog explaining the process of building one, but if you’re excited to start right away, you can always check out his FAQ for more juicy details.














So…inkjet?
Inkjets are great – if you want to print on an 8-1/2″ x 11″ (or 14″) strip of paper. Using this kind of robot, you can make a drawing of nearly unlimited size.
I want to see one of these with four control lines. With just two the control is not so good in the lower corners and along the extreme edges due to sag in the long side line. The motors have to be spread farther apart to have a larger working area.
With a motor at each corner the fine control zone can extend almost right up to the motors and can be maintained even when the tool is in a direct line between any two corners. A four corner system can also be extremely fast because there’s no wobble or jitter in the tool.
There are some (at least demo/experimental) systems using 8 lines to manipulate a tool in 3 dimensions.
Here’s what you’re asking for, but at this scale there’s still plenty of wobble.
http://vimeo.com/16379803
Great work.
I once had a similar idea – but unfortunately never could spare the time to actually do it. Maybe i’ll reproduce this cutie – if I will be able to spare the time someday …
@der_nachbauer: Thanks! I hope you do try. It’s a fun and relatively cheap/easy project that gives really amazing results.
@Galane: You’re right about the distortion at the extreme edges – but in practice it’s just not so bad. There are several examples of people who have used 4 lines or 4 steppers to provide a consistent point of contact with the vertical surface (check out Viktor and Dan Royer’s drawbots). Here’s my list of drawing robots – where you can find both of those links: http://shor.tw/yh
Something similar was posted quite some time ago:
http://hektor.ch/
Very interesting to see this repeated..
Here are some “Related Hacks” that actually relate:
http://hackaday.com/?s=polargraph
http://hackaday.com/?s=drawbot
Why not just mount the print head on a rail and move the paper roll up an down (wind/unwind) with a couple of motorized spindles?
@Hirudinea: You could totally do that! However, that would make it a more XY kind of system. It would also require lots of straight rails, bearings, etc. I think it would end up far more expensive than the little system I’ve got.
niceeee.. is it work?