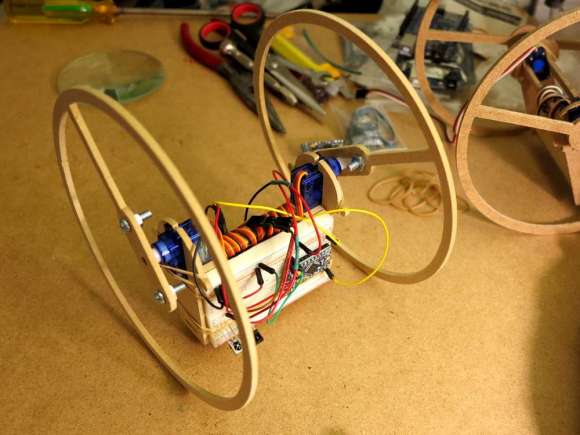
All of [Darcy]’s friends were making wheeled robots, so naturally, he had to make one too. His friends complicated theirs with h-bridges and casters for independent wheel maneuvering, but [Darcy] wanted something simpler. A couple of 9g servos later, the Rolly Bot was born.
Rolly Bot is self-balancing because of its low center of gravity. Should it hit a wall, the body will flip over, driving it back in the other direction. The BOM comes to a whopping $10, and that includes continuous rotation servos. It does not include the remote control capability he added later, or the cost of the CNC you would need to completely replicate this build. He even made a stand so he could test the wheels during programming.
[Darcy]’s code is on his site along with some pictures of another version someone else built. Watch Rolly Bot roll around after the jump.
How would you make this build even simpler? Tell us in the comments.













How is this a hack? Wait… “Filed Under: Arduino Hacks”. That explains everything. I really need to write myself a plugin that will hide all this arduino/raspi crap.
It’s not about the arduino. It’s the simple chassis. Clearly the control is just generic…
>It’s the simple chassis.
Made on expensive CNC, might as well call my Fiat 126p a hack because it’s simple chassis and primitive petrol engine.
People don’t have to make it the way I made it. I happen to like CNC. One could probably make this by hand easily. Just take a small piece of hardboard and then drill to tie wrap servos and breadboard. Make the circles with a protractor and cut them on a band saw. If don’t want to fabricate the chassis, send me your address and I’ll make you one on my cnc.
So what controller must it have?
“Should it hit a wall, the body will flip over, driving it back in the other direction”
No, it won’t.
The direction is still the same.
could be programmed, magically.
if you watched the video, you can watch it run into a wall, then start flipping, and it leaves the wall.
I watched it hit a wall, then spaz out until it wasn’t facing the wall anymore.
It made my day.
Perhaps inelegantly stated, but the proof is in the video. Stated more accurately. it might read:
“Should it hit a wall, the body will flip over, and the force of that flip will drive the entire assembly back in the other direction. In many cases, this is enough to free it or redirect it to avoid the wall.”
“When it strikes the wall the gondola can flip over so the motors won’t stall. In fact when the gondola flips it can back the robot away from the wall (usually unevenly so it can drive off).”
There are no absolutes.
I think you just tried to state an absolute there…
But yeah, I have no clue what will happen if the thing runs into a wall. I suspect it won’t climb up it. It might not break.
Watch the video. It doesn’t exactly “drive the other direction,” but the weight of the body falling back tosses the bot back several wheel rotations, plenty of room to make steering adjustments.
Yes, but it has no way of knowing it hit a wall and turn.
It’s a platform. You add your own sensors. It’s what you make of it.
I’m loving the single spoke wheel way more than I should.
Yeah, I got pretty excited about that. Also with that design you can cut more parts out of the interior of the wheel (to save material). It make working on it easier too.. I may go back to that in version 4. But a stronger spoke..
To make it simpler – use CDs or DVDs for wheels – it been done before
CD/DVDs! love the idea!
Can I hate Arduinos irrationally, too? I want to be in the cool kids club.
I like how Dave Jones puts it: https://www.youtube.com/watch?v=iHFm-kVTXW8
A good way to improve this would be to print everything within the diameter of one wheel, maybe by making each wheel have half of a “big diameter” and half of a “small diameter”. Make it laser-cuttable within a single A4/letter sheet of paper.
The layout of the parts on the raw material is an interesting area to explore. I went with six inch wheels to make sure it could fit a bread board and lots of room to get your hands in through the spokes to work on it…
As things stand, there is a fair amount of wasted material. So that invites more parts. I added a kickstand. Perhaps a handle next. I noticed people don’t know how to pick it up. Or parts to assist with fixing the battery.. or perhaps some arms to have sensors away from the board.
Can you explain the biz about the wheel’s half of a big diameter again?
The same thing in big.
http://youtu.be/aL0pSFmWMWM?t=1m26s
wow! I wonder what application they had in mind…
I’ve said it before and I’ll say it again but shut up and take my money!
Can someone add inertia compensators to stabilise the load?
Thanks for the comment! What a great idea. Actually, the program I posted can make smooth transitions. I only implemented one (smooth stop). But I think that’s a great area that the programmer can experiment with.
This weekend at our local arduino meetup I might work on a bunch more smooth transitions. In the mean time I have chosen two servos that don’t match well. I’m debating if I should make some sort of array to correct the power or just find two servos that match…
Can you use your CNC to burn encoder stripes into the wheels so you can use IR sensors as feedback?
I guess that could work. One could print an encoder wheel on a printer too and then stick it on…There’s be a lot of noise with all that swinging of the gondola though…..
wait, that might not matter… so as it swings it creeps forward and back a bit.. might not matter…
I wonder if the two spokes would work?
Would it be possible to add a $1.5 line follower sensor?
That’s a great idea to try it as a line follower. I’ve never made one and was thinking of it. I was thinking of just adding some IR distance sensors to the bottom so it could read the color of the floor based on reflection…
Did you see this one. Each wheel driven separately and XXL size: http://www.pieterverhees.nl/performance-follower
this is the right URL http://www.pieterverhees.nl/follower
wow, that’s nice!