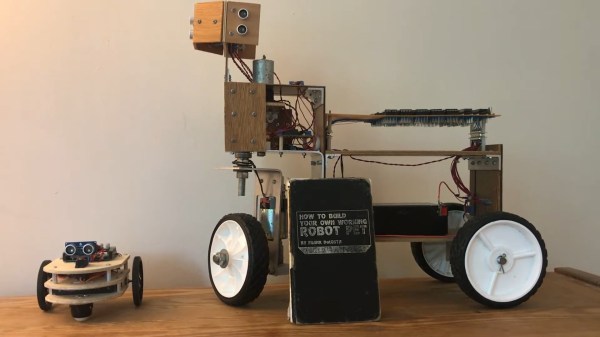
When [Ezra Thomas] needed inspiration for his senior design project, he only needed to look as far as his own robot. Built during his high school years from the classic 1979 Frank DaCosta book “How to Build Your Own Working Robot Pet”, [Ezra] had learned the hard way the many limitations and complexities of the wire wrapped 74xx series logic chips surrounding its 8085 processor.
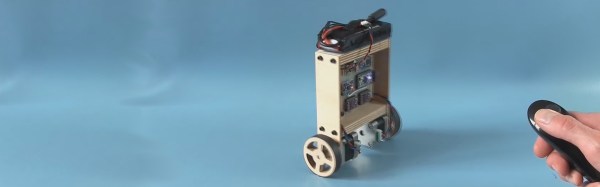
[Ezra] embarked on a quest to recreate the monstrosity in miniature, calling it Pet on a Chip. Using a modern FPGA chip allows the electronics to shrink by an order of magnitude and provides flexibility for future expansion. Implementing an 8 bit CPU on the amply sized FPGA left plenty of room for a VGA GPU, motor controller, serial UART, and more. Programming the CPU is handled by a custom assembler written in Python.
The results? Twelve times less weight, thirteen times less power draw, better performance, and a lot of room for growth. [Ezra] hints at an I2C bus expansion as well as a higher level programming language to make software development less of a hurdle.
The Pet On A Chip is a wonderfully engineered project and we hope that we’ll be seeing more such from [Ezra] as time goes by. Watch his Pet On A Chip in action in the video below the break.
If [Ezra]’s FPGA escapades have you wondering how to get started, you can check out this introduction to FPGA from the 2019 Hackaday Superconference. And if you have your own FPGA creation to share, please let us know via the Tip Line!
Continue reading “Robot Pet Is A Chip Off The Old Logic Block”


 We covered the
We covered the