If you want to terrify your neighborhood this Halloween, you might go for the old standbys like skeletons or zombies. But you don’t have to go gory to find glory. Consider the talking doll. Those things are creepy enough already, right? Well, [cabuu] says no, the doll should be animated with servos and have remote control. She should still be able to talk, just not when you expect her to.
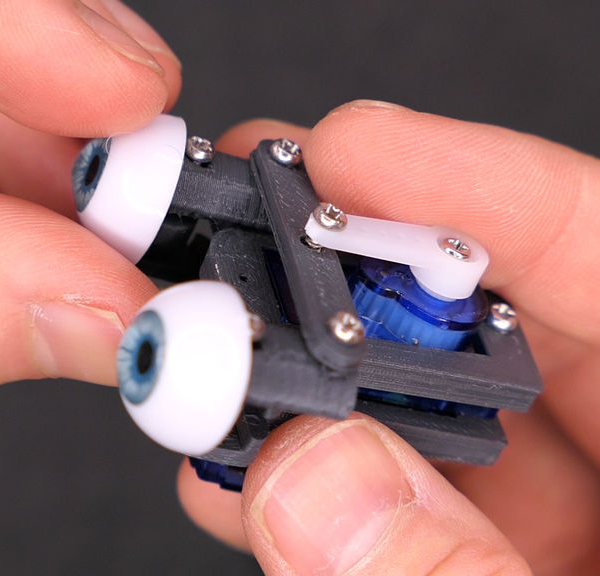
Forget pushing on her stomach, ’cause Baby’s got a Wemos D1 mini and her own Blynk app now. A set of sliders in the app control a micro servo that animates her eyes, and another servo that twists her head from side to side. Her head doesn’t go all the way ’round, but that’s probably for the best. There are preset fright modes [cabuu] can set and forget until she springs to life via motion sensor.
We particularly like the bracket [cabuu] designed and printed that joins the eyeballs with the servo, along with his clever use of printed mate brackets to hold the servos in place within the head. If you think you can stomach it, there’s a demo video after the break. Stay tuned for total doll dissection after that as [cabuu] builds and inserts the terrifying tidbits.
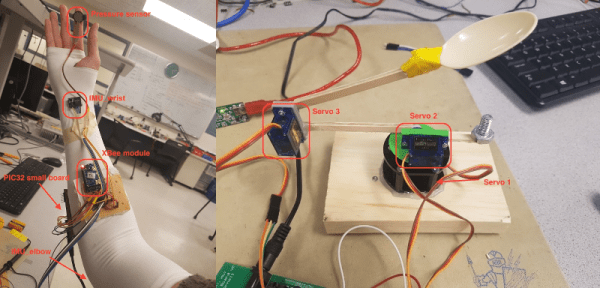
There are two main parts to this build: a sleeve worn by the user, and the robotic arm itself. The sleeve has IMUs at the elbow and wrist and a PIC32 that calculates their respective angles. The sleeve sends angle data to a second PIC32 where it is translated it into PWM signals and sent to the arm.
There’s a pressure sensor wired sleeve-side that’s worn between forefinger and thumb and functions as a release mechanism. You don’t actually have to fling your forearm forward to get the robot to throw, but you can if you want to. The arm itself is built from three micro servos and mounted for stability. The spoon was a compromise. They tried for a while to mimic fingers, but didn’t have enough time to implement grasping and releasing on top of everything else.
Initially, the team wanted wireless communication between the sleeve and the arm. They got it to work with a pair of XBees, but found that RF was only good for short periods of use. Communication is much smoother over UART, which you can see in the video below.
[Alonso Martinez] is an artist working on virtual characters at Pixar so it’s no wonder that his real life robots, Mira and Gertie, have personalities that make them seem like they jumped straight out of a Pixar movie. But what we really like are the tricks he’s used inside to bring them to life that are sure to get reused for the same or other things.
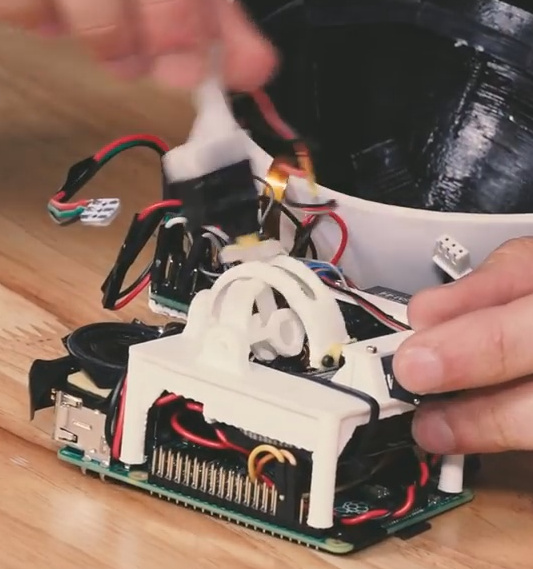
Mira’s head rotation mechanism
For example, Mira’s head can rotate in yaw, pitch and roll. To figure out how to make it do that he recalled having a joystick called the Microsoft Sidewinder Pro that had force feedback. That meant it might have had motors in line with the motions, much like what he wanted. To see how it worked, he bought one on eBay, took it apart, and improved on it to come up with his own design. But besides making use of the design in joysticks and heads, we can imagine it used to make robot eyeballs rotate in their sockets too. And as a side note, he’s running the robot off a Raspberry Pi, but notice the clever, space-saving way he’s mounted the whole mechanism to the Pi’s four mounting holes.
What also piqued our interest are the two tiny servos used in the head mechanism, two HD-DSM44 digital servos. These are even smaller than Tower Pro SG90s and with the added advantage of being metal geared.
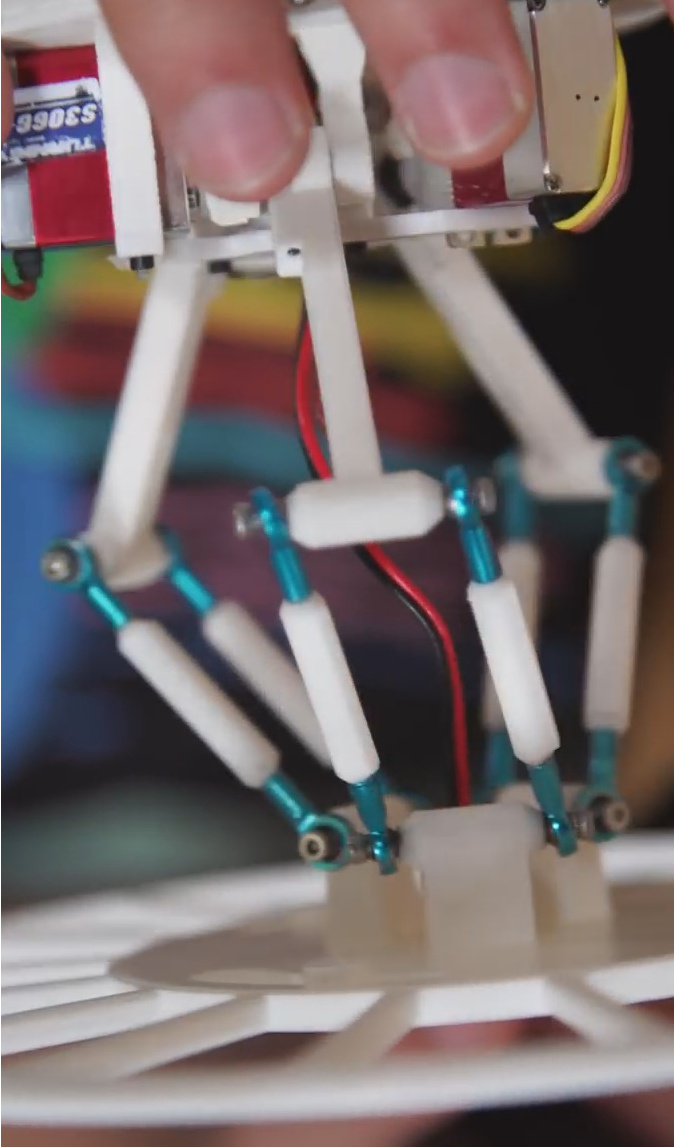
Gertie’s delta jumping legs
To make the eyes blink he had to overcome the fact the head was a thin-walled sphere sliding over the body, and the eyes had to fit in the thin wall without contacting the body. His solution was to make them out of OLED screens with acrylic hemispheres for the protruding eyeballs. The circuit boards talk to the screens through ribbon cables that are around 32 connections per inch, which made for some careful soldering. And to further create a thin profile he even sanded the solder points flat.
His other robot, the yellow and green Gertie, jumps to move around and its internal mechanism is also a joy to examine. To swivel and hop, it uses much the same design as a delta 3D printer, with three legs that can move the upper body in any direction, and compress like a spring before leaping. We like how his method for determining the appropriate thickness of 3D printed PLA parts such that they wouldn’t break was simply trial an error, taking advantage of the rapid prototyping possible with 3D printers. He did cheat on one main part of each leg though, and that was to go with RC car tie rods for the lower half of each leg — but we won’t tell on him if you won’t.
And that’s only a small sample of the neat tips and tricks you’ll find in the video below (they start looking inside the robots at 7:35).
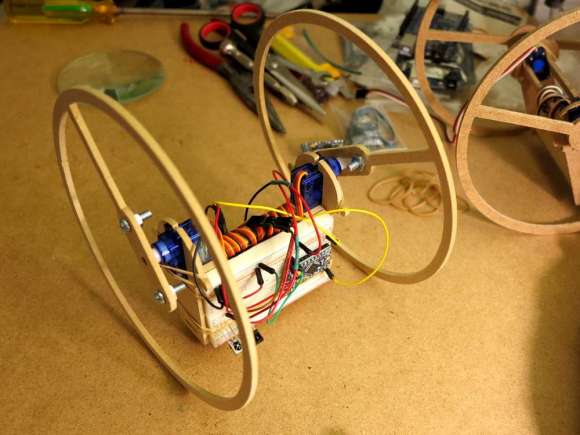
All of [Darcy]’s friends were making wheeled robots, so naturally, he had to make one too. His friends complicated theirs with h-bridges and casters for independent wheel maneuvering, but [Darcy] wanted something simpler. A couple of 9g servos later, the Rolly Bot was born.
Rolly Bot is self-balancing because of its low center of gravity. Should it hit a wall, the body will flip over, driving it back in the other direction. The BOM comes to a whopping $10, and that includes continuous rotation servos. It does not include the remote control capability he added later, or the cost of the CNC you would need to completely replicate this build. He even made a stand so he could test the wheels during programming.
[Darcy]’s code is on his site along with some pictures of another version someone else built. Watch Rolly Bot roll around after the jump.
How would you make this build even simpler? Tell us in the comments.

 Forget pushing on her stomach, ’cause Baby’s got a Wemos D1 mini and her own Blynk app now. A set of sliders in the app control a micro servo that animates her eyes, and another servo that twists her head from side to side. Her head doesn’t go all the way ’round, but that’s probably for the best. There are preset fright modes [cabuu] can set and forget until she springs to life via motion sensor.
Forget pushing on her stomach, ’cause Baby’s got a Wemos D1 mini and her own Blynk app now. A set of sliders in the app control a micro servo that animates her eyes, and another servo that twists her head from side to side. Her head doesn’t go all the way ’round, but that’s probably for the best. There are preset fright modes [cabuu] can set and forget until she springs to life via motion sensor.