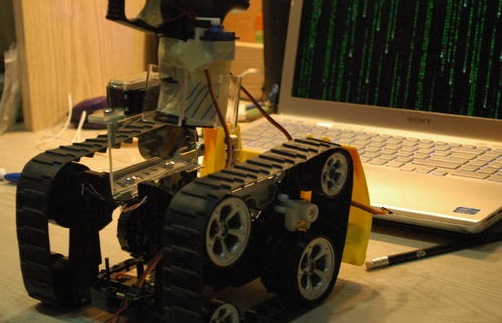
[Jon] and his brother converted an RC car into a robot that can fire airsoft pellets into the air. The little motorized vehicle was disassembled and a handheld was attached to the top. A pulling mechanism was put in place and a safety procedure was added to make sure no accidents occurred.
The chassis stand was created to hold the handle. The setup was then tested at this point, and a Raspberry Pi server was configured to have a camera that would act as the eyes for the robot. Once everything was in place, the wheels hit the ground and the vehicle was able to move around, positioning itself to aim the servos at a designated target. Footage was transmitted via the web showing what the robot was looking at.
A video of the remote-controlled counter-strike robot can be seen after the break. You could consider this your toy army. That makes this one your toy air force.














And the purpose of this POS is…?
Why to destroy humanity and take over the world you silly git.
Seems like overkill to add a microcontroller to control a servo on an RC vehicle, which has a receiver that controls servo’s…
First off, the RC vehicle they were using was a toy – it didn’t use servos originally.
Secondly, adding a microcontroller to mix (to control robot and gun) opens up a number of possibilities you couldn’t get with just RC control:
1. Path planning and control (using video camera)
2. Macro recording and playback
3. (future) Autonomous way-point navigation using GPS
4. Semi to fully automated aiming, leading and firing
These are just a few possibilities that are opened up – not to mention the fact that by having an Raspberry Pi on-board acting as a web server, they were basically able to bypass the need for a specialized (and likely proprietary) user interface – instead, any web browser (desktop, laptop, tablet, mobile) can act as the interface.
That… is actually a fairly comprehensive list of good points.
Of course, as a software developer, I’m wary of over-scoping (is that a word? Should be) a project. Of course, with software, a refactor is relatively easily done.
Props for the Matrix screensaver in the background…
With flat panels is screen burn even still a thing? Like do we even need to still use screensavers? What exactly are we saving screens from these days?
Looks like HAD got something wrong. We didn’t use an Arduino for the servos; that would be overkill.
Also the cameras were just simply eyes, not motion sensing. Hope that clears things up.
Oh god a nitro dozer, I guarantee this hack started off because you can barely find the battery packs anymore. Some hinged monstrosity Tyco invented offhand.
hello,
I made an automated turret couple of years ago. It uses a webcam and opencv to detect the target location. The video can be searched on youtube under the keyword “neobanana1 airsoft turret”. Was wondering if anyone else has a similiar system that I can compare to?
Thank you