We’ve all seen videos of those crazy Boston Dynamics running quadruped robots that can reach up to 28 mph. Those things are amazing and it’s almost impossible to imagine how to even start building one. [Max] loves his robots and wanted to build a quadruped but, being a robot hobbyist, didn’t have the serious cash needed to make an extravagant robot like those of Boston Dynamics. Instead he started bridging the gap by designing a quadruped robot that is a little bit slower and tons cheaper.
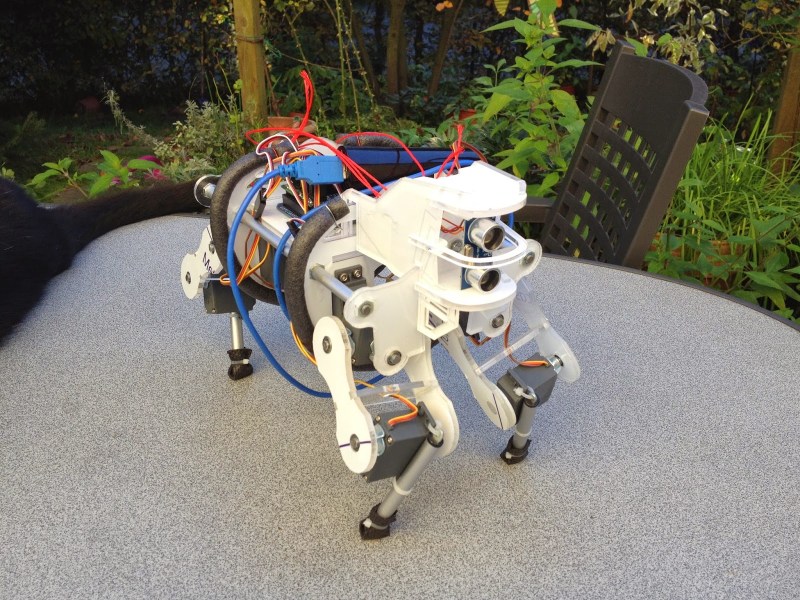
 [Max] designed all of the mechanical parts himself. After weighing the advantages and disadvantages of different materials, he decided that the frame would be made from 5mm acrylic sheet. The main body of the robot has acrylic ribs that are spaced apart by threaded rods. Twelve RC servos make up all of the joints, 3 in each leg. Notice in this photo how there is one servo that immediately rotates another servo. To support the other side of the rotating servo, [Max] epoxied on a T-nut, stuck in a short length of threaded rod which is then supported in the frame by a ball bearing. Simple and effective! The upper portions of the legs are also made from acrylic sheet and the lower legs are from a cheap camera tripod. Rubber feet ensure a slip resistant stance.
[Max] designed all of the mechanical parts himself. After weighing the advantages and disadvantages of different materials, he decided that the frame would be made from 5mm acrylic sheet. The main body of the robot has acrylic ribs that are spaced apart by threaded rods. Twelve RC servos make up all of the joints, 3 in each leg. Notice in this photo how there is one servo that immediately rotates another servo. To support the other side of the rotating servo, [Max] epoxied on a T-nut, stuck in a short length of threaded rod which is then supported in the frame by a ball bearing. Simple and effective! The upper portions of the legs are also made from acrylic sheet and the lower legs are from a cheap camera tripod. Rubber feet ensure a slip resistant stance.
All of the servos are controlled by an Arduino Mega. [Max] is currently writing a sketch that will perform the complex math and determine coordinated servo motions for movements us humans take for granted, like ‘walk forward’. As you can see in the videos, [Max’s] robot won’t be catching the Boston Dynamics’ Cheetah any time soon but he is off to a great start.
Future plans for this project include bluetooth control and integrating the ultrasonic sensor proactively installed in the ‘head’ of the robot. Check out the videos after the break. [Max] is looking for some feedback on his project. We here at HaD think this needs a great name. Let’s hear some suggestions in the comments…














He might has a need for the Pixy (CMUcam5) in the head enclosure:
http://charmedlabs.com/default/?page_id=211
I hope those are high speed servos from hobbyking.
This has already been done (sort of) – It’s called a Sony Aibo
(although it lacks roll and yaw capability)
http://www.youtube.com/watch?v=2l2P8Uz0LkA
Yeah, but $ony pulled it from the market…
This one looks more like the Big Dog from Boston Dynamics though ;)
littledog?
first name that comes to mind: Jitterbug
Very sweet. I made a similar, simpler, thing last year:
https://www.youtube.com/watch?feature=player_embedded&v=Jv6S1sCut6E
with the idea that I wanted it to learn to walk on it’s own using feedback from an accelerometer and motor current, but have stalled out — as it were. I found the MMA8452Q accel chip to be _really_ noisy with respect to distinguishing any kind of forward motion from the usual shake-rattle-roll. Will be interested to see how your project progresses.
Any chance of somehow getting the bot to learn how to walk effectively? Kind alike this:
[youtube http://www.youtube.com/watch?v=mJaI2bnaq9Q&w=560&h=315%5D
Ah I found the one I was originally looking for, still really cool: http://vimeo.com/79098420
Okay. So 3 years later. How far have we [backyard Einsteins] come until today?